BRAIN GENEALOGY
Which machines lead up to the Big Brain project?
Which machines are the result of the Big Brain?
Which machines are the result of the Big Brain?
a machine overview by Humanoido
I'm retracing the complete history of all Humanoido-created precursor machines leading up to the Big Brain, including machines resulting from the Big Brain. I know this is an enormous task and it will take some time to locate, categorize and enumerate the general historically agreed-upon and verified number of approximately 2000 machines.
I'm an inventor and there is no surprise as to the quantity and number of different machines - a variety of which span various fields of science, some which are historical and some which belong in the future.
Starting small and filling in the gaps over time from pieced together web and computer records plus notes should prove accurate. Text descriptions for specific machines will also be referenced and linked when source material is available. Machine photos may also be provided. This list is ongoing for continued development. So you think the Propeller Big Brain was an overnight project? Think again. The following chronology over the past 11 years (from the year 2002) depicts over 1,300 processor machines invented and developed, many with Parallax processors, all directly leading up to the Big Brain and then continuing.
NOTE: a cache of historical records and detailed documents for additional machine inventions was recently discovered and these will be classified, documented, and released. These will be added to the Genealogy as time permits.
UPDATE TO THE GENEALOGY
The Genealogy is now including and tracing machines after the birth of the Big Brain. The evolution of these machines is remarkable and should be followed to see how new machines are changing not only in function and construction of parts (or no parts) but discovery and form as well.
I'm an inventor and there is no surprise as to the quantity and number of different machines - a variety of which span various fields of science, some which are historical and some which belong in the future.
Starting small and filling in the gaps over time from pieced together web and computer records plus notes should prove accurate. Text descriptions for specific machines will also be referenced and linked when source material is available. Machine photos may also be provided. This list is ongoing for continued development. So you think the Propeller Big Brain was an overnight project? Think again. The following chronology over the past 11 years (from the year 2002) depicts over 1,300 processor machines invented and developed, many with Parallax processors, all directly leading up to the Big Brain and then continuing.
NOTE: a cache of historical records and detailed documents for additional machine inventions was recently discovered and these will be classified, documented, and released. These will be added to the Genealogy as time permits.
UPDATE TO THE GENEALOGY
The Genealogy is now including and tracing machines after the birth of the Big Brain. The evolution of these machines is remarkable and should be followed to see how new machines are changing not only in function and construction of parts (or no parts) but discovery and form as well.
List of "Machine Series" Development - There are numerous phases to development generally beginning with one Parallax processor, then leading up to multiple processors. Some projects led to a series of several machines. Some projects include many machines, each with a different communications design for example. In several projects, numerous machines were built in some incremental series or consecutively, each for testing. The Phase Series appears titled in red and individual machines are listed in blue along with links.
List of Parallax Processor Machines Developed
Leading Up To The Big Brain & Beyond
Leading Up To The Big Brain & Beyond
Though this is a comprehensive list, there are certainly some holes where machines are not included. As these machines resurface, and as time permits, they will go in the list.
Machine Categories List
Humanoid Toddler Series (7)
Humanoid Can Man Series (4)
Penguin Robot Series (47)
Tertiary Adjunct Series (12)
Tertiary Series (3)
BASIC Stamp Supercomputer Era Series (10)
Specialty Multi-Processor Stamp Series (3)
4DSC Series (2)
Spark Series (10)
Propalot Series (3)
UltraSpark Series (31)
Super Boe-Bot Series (2)
LED Series (2)
Brain Blob Series (6)
Twin Brain Series (3)
2-Propellers Series (4)
Brain in a Jar Series (7)
Auditory Machine Series (5)
Specialty Brain Series (35)
Breakthrough Technology Series (4)
Skinned Brain Series (2)
Order Machine Series (2)
Brain Matter Injector Series (5)
Cog Machine Series (5)
Propeller Loader Series (4)
Injector Experiment Machine Series (7)
Partition Machine Series (2)
Numerical Prop Array Series (5)
Brain Modules Series (5)
Brain Span Series (3)
Brain EXO Series (3)
Brain Offspring Children Series (18)
Massive Machine Series (16)
Medium Series (3)
Big Brain Series (4)
Tiny Series (3)
Brain Hemisphere Series (4)
Hybrid Machine Series (7)
Processor VP Machine Series (1000)
Little SideKick Series (3)
Machines Recently Added (2)
Supercomputers (5)
Retro Supercomputers (2)
Power Cube Super Computing Machines (4)
Transforming Machines (1)
SuperTronic Series of Brains (14)
Big Brain Nano Technology Machines (5)
Extremely Powerful Telescopes (12)
Other Telescopes (3)
Molecular Microscopes (2)
Interesting Invention Machines (4)
Quantum Machines (4)
Other Machines (5)
Monster Machines (6)
New Machines (7)
Historical Additions (44)
Software Machines (23)
Advanced Projects (55)
Human Mind Inventions (71)
Additional Inventions (75)
Medical Inventions (31)
Space1 Inventions (24)
------------------------------------------
Total Machines ~ 1,706
 Humanoid Toddler V1
The 1st humanoid made from a Parallax Toddler robot kit. It used the SSC Serial Servo Controller to program all servos.
Humanoid Toddler V1
The 1st humanoid made from a Parallax Toddler robot kit. It used the SSC Serial Servo Controller to program all servos.
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
 Humanoid Toddler V2 The 2nd humanoid made from improvements over Humanoid Toddler V1. This version ran from the PSC Parallax Serial Controller which positioned each servo.
Humanoid Toddler V2 The 2nd humanoid made from improvements over Humanoid Toddler V1. This version ran from the PSC Parallax Serial Controller which positioned each servo.
Humanoid Toddler Kit
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
Consists of kit to make a Toddler Humanoid. Included 2 processors and software to position each servo just by sliding a mouse.
TH1 Toddler Humanoid
The Toddler Humanoid from a Kit was expanded with more processors.
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
 Humanoid Toddler Leg Machine
Humanoid Toddler Leg Machine
http://tech.groups.yahoo.com/group/toddler_robot/
This was a set of humanoid legs built from one Toddler Robot kit. Rechargeable batteries were mounted in the legs to lower the center of balance. Best demonstrated by the surviving two small videos posted at the Yahoo Toddler Group. The legs do two dance shuffles set to music.
Humanoid Toddler Talker
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
uses a Parallax BS2 interfaced to a small SPO256 speech synthesizer chip and micro speaker with the LM386 amp chip. Walks and talks.
 Humanoid Toddler HT Version
Humanoid Toddler HT Version
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
The HT version Humanoid Toddler was intended as a kit of parts with instructions and a manual. The manual included assembly, adjusting, operating and programming. It also included application ideas like dancing and Tai Chi. HT did not include a PING.
Humanoid Can Man Series (4)
Penguin Robot Series (47)
Tertiary Adjunct Series (12)
Tertiary Series (3)
BASIC Stamp Supercomputer Era Series (10)
Specialty Multi-Processor Stamp Series (3)
4DSC Series (2)
Spark Series (10)
Propalot Series (3)
UltraSpark Series (31)
Super Boe-Bot Series (2)
LED Series (2)
Brain Blob Series (6)
Twin Brain Series (3)
2-Propellers Series (4)
Brain in a Jar Series (7)
Auditory Machine Series (5)
Specialty Brain Series (35)
Breakthrough Technology Series (4)
Skinned Brain Series (2)
Order Machine Series (2)
Brain Matter Injector Series (5)
Cog Machine Series (5)
Propeller Loader Series (4)
Injector Experiment Machine Series (7)
Partition Machine Series (2)
Numerical Prop Array Series (5)
Brain Modules Series (5)
Brain Span Series (3)
Brain EXO Series (3)
Brain Offspring Children Series (18)
Massive Machine Series (16)
Medium Series (3)
Big Brain Series (4)
Tiny Series (3)
Brain Hemisphere Series (4)
Hybrid Machine Series (7)
Processor VP Machine Series (1000)
Little SideKick Series (3)
Machines Recently Added (2)
Supercomputers (5)
Retro Supercomputers (2)
Power Cube Super Computing Machines (4)
Transforming Machines (1)
SuperTronic Series of Brains (14)
Big Brain Nano Technology Machines (5)
Extremely Powerful Telescopes (12)
Other Telescopes (3)
Molecular Microscopes (2)
Interesting Invention Machines (4)
Quantum Machines (4)
Other Machines (5)
Monster Machines (6)
New Machines (7)
Historical Additions (44)
Software Machines (23)
Advanced Projects (55)
Human Mind Inventions (71)
Additional Inventions (75)
Medical Inventions (31)
Space1 Inventions (24)
------------------------------------------
Total Machines ~ 1,706
Humanoid Toddler Series (7)
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html

Humanoid Toddler Kit
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
Consists of kit to make a Toddler Humanoid. Included 2 processors and software to position each servo just by sliding a mouse.
TH1 Toddler Humanoid
The Toddler Humanoid from a Kit was expanded with more processors.
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
http://tech.groups.yahoo.com/group/toddler_robot/
This was a set of humanoid legs built from one Toddler Robot kit. Rechargeable batteries were mounted in the legs to lower the center of balance. Best demonstrated by the surviving two small videos posted at the Yahoo Toddler Group. The legs do two dance shuffles set to music.
Humanoid Toddler Talker
http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
uses a Parallax BS2 interfaced to a small SPO256 speech synthesizer chip and micro speaker with the LM386 amp chip. Walks and talks.

http://humanoidolabs.blogspot.tw/2012/09/toddler-humanoidlevel-1-construction.html
The HT version Humanoid Toddler was intended as a kit of parts with instructions and a manual. The manual included assembly, adjusting, operating and programming. It also included application ideas like dancing and Tai Chi. HT did not include a PING.
Humanoid Can Man Series (4)
Humanoid Can Man V1 - 1 Stamp processor motion mobility, sensors
Humanoid Can Man V2 - 2 Stamp processors added speech
Humanoid Can Man V3 - 3 Stamp processors more servo control
Humanoid Can Man V5 - 5 Stamp processors runs other boards
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1001739&viewfull=1#post1001739
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=988562&viewfull=1#post988562
A Penguin robot with its BS2px-24 motherboard was initially connected to the BASIC Stamp Supercomputer BSS collective of 12 computers. Then the BSS was upgraded to more computers (~20) and the Brain of All Brains was born. The brain of Penguin Robot was disembodied by tapping into and connecting it to the BSS Supercomputer through the built in PIN Port. In a kind of Brain Cortex collective extension, Penguin's brain was made into a parallel cluster of processing power, rewiring the original thought processes, creating a hive or gang of Synaptic Regio, more closer to mimicking a human's brain. Overall, the operation was a great success! The brain surgery was simple and accomplished by hand. Connect 3 wires, + to Vdd, - to Vss and S to P2 on Master Computer MC. The power of Penguin's brain became so fantastic, that accessing all the power and all the sensors and all the peripherals made it "THE BRAIN" of All Brains!
PENGUIN WITH 26 BRAINS (NEW)
http://humanoidolabs.blogspot.tw/2013/11/penguin-robot-with-26-brains.html
In this experiment, a Parallax Penguin robot had its head expanded to include more brains. It was connected to the BSS Supercomputer, the Master Offloader machine and rogue boards and processors. The M.O.M. machine has ten processors, the BSS has twelve processors, another two plus the Lenovo PC, and Penguin has one, making a total of 26 brains!
Penguin Superhero
Superhero robot with super powers, article published in Robot magazine
Penguin Humanizer
robot detects humans with PIR technology and by wearing a top hat
Penguin Seeing Eye Dog
robot acts as a seeing eye dog with ultrasonics, sees in total darkness, helps visually impaired navigate, has audible response based on sound.
Penguin Old Age
robot with old age persona, walks like a very old man
Penguin Weightlifter robot lift weights. The weights are Chinese coins stacked on one or two feet.
Penguin Happy Feet Dancer
robot dances with happy feet
Penguin Soccer Player
robot plays soccer with infrared remote
Penguin BOE-BOT
Robot that's a very tiny Boe-Bot robot
Penguin BUG
robot takes the form of a bug eyed bug
Pocket Penguin
smallest form factor robot fits in shirt pocket
Penguin the Brain
robot with the most powerful brain
Santa Penguin
robot with Santa Claus persona
Penguin Skater
robot with its own skates to rollerskate
Transformer Frog
robot that transforms into a frog
Penguin Cricket
http://forums.parallax.com/showthread.php/98302-PENGUIN-ROBOT-Transformer-the-Code
Robot transforms into an annoying cricket. Basically, as a practical joke, Penguin thinks it's cool to hide somewhere (behind the couch) and transform into a cricket, randomly chirping to drive everyone totally insane! Here's the plan: while hiding, Penguin bot will use a random number generator and Virtual Sound Synthesizer to chirp like a cricket, and do it so randomly in time that locating the sound will be difficult. He chirps, then naps an unpredictable time, wakes up, chirps again, then repeats the process! The cricket sounds coming from the peizo speaker are intentionally selected for volume and frequency to create a virtual surround sound appearing to come from every direction. Transforming into a cricket uses numerous techniques. The code includes nap, random number generation, Virtual Sound Synthesizer, virtual surround sound, volume,
timing, frequency, and power consumption reduction (PCR).
The Determinator Penguin
http://forums.parallax.com/showthread.php/103690-Penguin-Robot-the-Determinator
Code Name: penguin_sound_determinator.bpx
Penguin accepts values to find the desired tone. Penguin becomes a freqout frequency sound determinator. Input values to find the right tone sound you're looking for. This is code to cycle through the values based on entered frequency numbers, and play the resulting tones.
Penguin with the Big Finger
Penguin Tech is Born! - Penguin Robot Society [PDF]
www.p-robot.com/pdf/PT01.pdf
Penguin Robot Series (47)
Wireless Penguins transmit functions to many Penguin robot brains through a wireless remote using infrared
3-Brain Penguin
wirelessly connects three Penguin robot brains together, shares command
data transmitted by a master Penguin brain on a wireless infrared
communications channel. Uses stock Penguins, PBASIC programming & no
added hardware necessary.
Penguin with 12 Brains (aka Penguin on Supercomputer)
World's
smartest Parallax Penguin Robot. In this project, Penguin's brain was
connected to the BASIC Stamp Supercomputer. This created the potential
to write 16,000 instructions, added all the resources of the Basic Stamp
Supercomputer, 176 controlling ports, color uOLED display, green screen
LCD, ultrasonic vision, presence sensors, memory, speech in English and
Chinese.
The Brain of All Brains
http://forums.parallax.com/showthread.php?108169-World-s-Smartest-Penguin-RobotA Penguin robot with its BS2px-24 motherboard was initially connected to the BASIC Stamp Supercomputer BSS collective of 12 computers. Then the BSS was upgraded to more computers (~20) and the Brain of All Brains was born. The brain of Penguin Robot was disembodied by tapping into and connecting it to the BSS Supercomputer through the built in PIN Port. In a kind of Brain Cortex collective extension, Penguin's brain was made into a parallel cluster of processing power, rewiring the original thought processes, creating a hive or gang of Synaptic Regio, more closer to mimicking a human's brain. Overall, the operation was a great success! The brain surgery was simple and accomplished by hand. Connect 3 wires, + to Vdd, - to Vss and S to P2 on Master Computer MC. The power of Penguin's brain became so fantastic, that accessing all the power and all the sensors and all the peripherals made it "THE BRAIN" of All Brains!
PENGUIN WITH 26 BRAINS (NEW)
http://humanoidolabs.blogspot.tw/2013/11/penguin-robot-with-26-brains.html
In this experiment, a Parallax Penguin robot had its head expanded to include more brains. It was connected to the BSS Supercomputer, the Master Offloader machine and rogue boards and processors. The M.O.M. machine has ten processors, the BSS has twelve processors, another two plus the Lenovo PC, and Penguin has one, making a total of 26 brains!
Legion of Superheros
Robot Magazine * Penguin Robot Superhero
Robot Magazine * Source Code
Robot Magazine * Notes & Diagrams
Twelve Penguins, each with one BS2px processor, operating in parallel
Photos in Robot Magazine
Penguin Astronaut
http://forums.parallax.com/showthread.php/137688-Flying-Penguin?p=1191890
A flying Parallax Penguin persona. After the Penguin Super Hero project, a Penguin Astronaut was developed for trips into space. Because Penguin robot uses the most powerful Stamp processor and already has sensors built in (compass, light sensors, infrared sensors, input switch, seven LEDs (as segments), ports for sensor add ons), it makes an ideal "working payload." As an astronaut, Penguin can control things with its two tiny and light weight leg NARO servos. More information about Penguin is at the PRS Penguin Robot Society.
Robot Magazine * Source Code
Robot Magazine * Notes & Diagrams
Twelve Penguins, each with one BS2px processor, operating in parallel
Photos in Robot Magazine
Penguin Astronaut
http://forums.parallax.com/showthread.php/137688-Flying-Penguin?p=1191890
A flying Parallax Penguin persona. After the Penguin Super Hero project, a Penguin Astronaut was developed for trips into space. Because Penguin robot uses the most powerful Stamp processor and already has sensors built in (compass, light sensors, infrared sensors, input switch, seven LEDs (as segments), ports for sensor add ons), it makes an ideal "working payload." As an astronaut, Penguin can control things with its two tiny and light weight leg NARO servos. More information about Penguin is at the PRS Penguin Robot Society.
Bat Penguin
http://95.110.232.70/index.php/penguin-tech-3.html
http://95.110.232.70/sources/PT03_FILES.ZIP
http://95.110.232.70/pdf/PT03.pdf
Read Penguin Tech Magazine issue #3 for the construction article. Robot with Batman persona reads battery level. Uses one light sensitive CaS photocell on Penguin's motherboard to read the power LED.
http://95.110.232.70/index.php/penguin-tech-3.html
http://95.110.232.70/sources/PT03_FILES.ZIP
http://95.110.232.70/pdf/PT03.pdf
Read Penguin Tech Magazine issue #3 for the construction article. Robot with Batman persona reads battery level. Uses one light sensitive CaS photocell on Penguin's motherboard to read the power LED.
Penguin Superhero
Superhero robot with super powers, article published in Robot magazine
Penguin Humanizer
robot detects humans with PIR technology and by wearing a top hat
Penguin Seeing Eye Dog
robot acts as a seeing eye dog with ultrasonics, sees in total darkness, helps visually impaired navigate, has audible response based on sound.
Penguin Old Age
robot with old age persona, walks like a very old man
Penguin Weightlifter robot lift weights. The weights are Chinese coins stacked on one or two feet.
Penguin Happy Feet Dancer
robot dances with happy feet
Penguin Soccer Player
robot plays soccer with infrared remote
Penguin BOE-BOT
Robot that's a very tiny Boe-Bot robot
Penguin BUG
robot takes the form of a bug eyed bug
Pocket Penguin
smallest form factor robot fits in shirt pocket
Penguin the Brain
robot with the most powerful brain
Santa Penguin
robot with Santa Claus persona
Penguin Skater
robot with its own skates to rollerskate
Transformer Frog
robot that transforms into a frog
Penguin Cricket
http://forums.parallax.com/showthread.php/98302-PENGUIN-ROBOT-Transformer-the-Code
Robot transforms into an annoying cricket. Basically, as a practical joke, Penguin thinks it's cool to hide somewhere (behind the couch) and transform into a cricket, randomly chirping to drive everyone totally insane! Here's the plan: while hiding, Penguin bot will use a random number generator and Virtual Sound Synthesizer to chirp like a cricket, and do it so randomly in time that locating the sound will be difficult. He chirps, then naps an unpredictable time, wakes up, chirps again, then repeats the process! The cricket sounds coming from the peizo speaker are intentionally selected for volume and frequency to create a virtual surround sound appearing to come from every direction. Transforming into a cricket uses numerous techniques. The code includes nap, random number generation, Virtual Sound Synthesizer, virtual surround sound, volume,
timing, frequency, and power consumption reduction (PCR).
The Determinator Penguin
http://forums.parallax.com/showthread.php/103690-Penguin-Robot-the-Determinator
Code Name: penguin_sound_determinator.bpx
Penguin accepts values to find the desired tone. Penguin becomes a freqout frequency sound determinator. Input values to find the right tone sound you're looking for. This is code to cycle through the values based on entered frequency numbers, and play the resulting tones.
Penguin with the Big Finger
Penguin Tech is Born! - Penguin Robot Society [PDF]
www.p-robot.com/pdf/PT01.pdf
Finally the little bot can flick his big finger to the world. This sole finger is made from a Piezo Film Vibra Tab Mass sensor by Parallax, part number 605-00004. * Low Cost * Light Weight * Simple Code * Easy RC Circuit * Uses only 1 sensor and 2 parts (diode, capacitor). Read about it in Penguin Tech Magazine 1.
Carpet Shag Walker Penguin the only Penguin that can very effectively walk on carpet, high steps to avoid snagging the rug
penguin_shag_walker.bpx
(from the penguin_program_name.bpx suite)
Penguin Line Dancer
penguin_line_dance_1v6.bpx
(from the penguin_program_name.bpx suite)
Carpet Shag Walker Penguin the only Penguin that can very effectively walk on carpet, high steps to avoid snagging the rug
penguin_shag_walker.bpx
(from the penguin_program_name.bpx suite)
Penguin Line Dancer
penguin_line_dance_1v6.bpx
(from the penguin_program_name.bpx suite)
Penguin AI
http://forums.parallax.com/showthread.php/98922-PENGUIN-ROBOT-Artificial-Intelligence-the-Code
See if you can outsmart the AI Penguin robot playing Tic Tac Toe. If you play a game and Penguin wins, there must be some intelligent thinking in the process. This is one form of AI (Artificial Intelligence). Though AI is a debatable field with many aspects, this demo example makes use of the ancient game of Tic Tac Toe. Pit your wit against Penguin robot. This version has it all - graphics, sound, Penguin laughter, Cats game, and winning and losing!
Ultravision Penguin
http://forums.parallax.com/showthread.php/99710-PENGUIN-ROBOT-Ping-UltraVision-the-Code
Code Name: penguin_ping_ultravision.bpx
Purpose: PING))) Expansion Enables Ultra Vision, Penguin can see from 1-inch out to 9-feet! Just plug in the Parallax PING))) and run this
code. Ultravision is a unique way of seeing things, even in total
darkness!
Memory Master Penguin
http://forums.parallax.com/showthread.php/99641-PENGUIN-ROBOT-BRAIN-Memory-Master-the-Code
Code Name: penguin_memory_master.bpx
Penguin is a Utility, Diagnostic, and Programmers Tool. Read or write to memory with a series of utility programs to help in developing code. With this program, you can look into the brain for memory observation or do surgery.
Penguin Spy Bot
http://forums.parallax.com/showthread.php/98521-PENGUIN-ROBOT-Counting-Eye-the-Code
This is a Penguin robot with a big watchful eye that can hide and see people walking around. The eye has purpose - count people passing by a doorway.
Penguin on LCD
http://www.p-robot.com/index.php/display.html
Penguin Robot is now on LCD. Robot has on board LCD for communications. Code includes all details necessary to attach a BPI-215 Scott Edwards LCD Display. This program displays two lines at the full LCD speed of 9600 baud.
Penguin Runner
http://forums.parallax.com/showthread.php/99946-PENGUIN-ROBOT-Run-the-Code
The fastest running Penguin robot on the planet! This new Penguin robot persona is a motion control program that adds the function of run to penguin. Penguin will run a short distance, then stop. Push reset to repeat.
Scout Penguin
Boy Scouts will be envious of this scouting master equipped with a compass, light beacon, and morse code signaling device
Aerobic Penguin
Robot does aerobic exercises
Penguin Talker
Robot talks
Virtual Gearing
A virtual gearbox
Virtual Keyboard
A virtual keyboard
Virtual Sound Chip
The ultimate soundbox with a VR chip that creates fantastic sounds
Virtual Servos
The first Penguin robot virtual servo, has no weight yet moves the robot in the third direction
Virtual Screen Compass
Virtual 2-Digit Display (with a 1-digit display)
Virtual 3-Digit Display (with a 1-digit display)
Virtual Touchpad
Virtual Human Speech
Virtual Radio
Spectacular multi-band radio made from Penguin robot's motherboard, compass and piezo speaker. Directionally tuned for different world frequency bands.
Virtual Transforming
Tertiary Adjunct Series (12)
Tertiary Adjunct 1 of 12 robot with Parallax robot board
Tertiary Adjunct 2 of 12
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1024433&viewfull=1#post1024433
Tertiary Adjunct 3 of 12
Tertiary Adjunct 4 of 12
Tertiary Adjunct 5 of 12
Tertiary Adjunct 6 of 12
Tertiary Adjunct 7 of 12 with PING)))
Tertiary Adjunct 8 of 12
Tertiary Adjunct 9 of 12
Tertiary Adjunct 10 of 12
Tertiary Adjunct 11 of 12
Tertiary Adjunct 12 of 12
Tertiary Series (3)
Tertiary Brain 1 breadboard, 14 Propeller chips, 112 Cogs, 112 processors
Intermediate Tertiary ADJUNCT 8 props 4 proto boards 2 props on each
Tertiary 20 20 props, 15 proto boards stacked 5 props
BASIC Stamp Supercomputer Era Series (8)
BASIC Stamp Supercomputer

1st hobby supercomputer using BASIC Stamps. Popularized putting together many processors to make a more powerful machine. Improved and upgraded to contain over 20 stamps.
Stamp SEED Supercomputer

World’s 1st living stamp supercomputer. Ten Stamp processors - each is a life form. They are born, develop a unique personality, talk to neighbors, remember conversation, recall information, do work, nap, sleep, and dream. Includes wireless transceiver.
TriCore Stamp Supercomputer

For testing and developing other supercomputers. Three Stamp processors = minimum requirement to test/ develop the Stamp SEED Supercomputer. Rapidly load/test multiple processor code. Includes lite version of life form code from Stamp SEED Supercomputer.
Minuscule Stamp Supercomputer

Smallest possible supercomputer, lowest cost, increases power of one processor. Contains two processors. Used for testing/writing code related to connecting Stamps together, establishing baud rates, timing/syntax, and exploring various network configurations.
Tiny Stamp Supercomputer
Robot Magazine Jan./Feb. 2011, LERN p. 16
The world's 1st first hand-held BASIC Stamp supercomputer. Absolutely most powerful, considering it has the smallest footprint with many tiny networked processors. Has its own book with 30 fun projects. Includes Architecture, Assembly, Programming, Tutorial, Applications, Complete Code. The TSS has multiple computers, LCD monitor, radio transmitter, receiver, speakers, breadboard real estate and a 64K EEPROM memory board, interfaced to a tiny Hub. The TSS Stamp supercomputer is so small, it will fit into a soup bowl or coat pocket. Includes special features such as hardware programming "on the fly."
Two-Stamp BASIC Stamp Supercomputer

The wiring for connecting a BS2sx to a BS2px BASIC Stamp processor - how to amplify the power of one Stamp. Different from Minuscule Stamp Supercomputer. Uses different BASIC Stamp processors.
Handbook of Basic Stamp Supercomputing
(Does not count as a machine, although the book describes different BASIC Stamp Supercomputer configs.) This book is written to answer many questions about hobby BASIC Stamp Supercomputers and offer a starting point for construction of your own Stamp Supercomputer. Includes apps and programming and many details to get you started immediately. Delves into Stamp Artificial Intelligence and many aspects of Stamp super computing. Electronic version is posted and available for download free of charge.
SuperSTAMP
 http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=982969&viewfull=1#post982969 A nine core machine. Communications was developed and tested on the first Propeller positioned above the
first BS2 which is known as the SuperSTAMP. The SuperSTAMP is another
project developed to give maximum power to a BASIC Stamp. The SuperSTAMP
mates to the PPPB and consists of both Tx and Rx programs along a
common protected BUS. It's essentially a BASIC Stamp enhanced with the addition of one propeller chip that adds eight additional cores.
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=982969&viewfull=1#post982969 A nine core machine. Communications was developed and tested on the first Propeller positioned above the
first BS2 which is known as the SuperSTAMP. The SuperSTAMP is another
project developed to give maximum power to a BASIC Stamp. The SuperSTAMP
mates to the PPPB and consists of both Tx and Rx programs along a
common protected BUS. It's essentially a BASIC Stamp enhanced with the addition of one propeller chip that adds eight additional cores.Also see QuadLyzer and Master Offloader Machine M.O.M.

http://forums.parallax.com/showthread.php/124495-Fill-the-Big-Brain/page60
The design was made possible with Beans BS2Prop and 80 parallel stamps emulation to make a brain stem. Twenty Propeller chips using 80 cogs out of 160 to create eighty parallel BS2's for a more powerful Brain Stem. Larger rectangles show Propeller chips. Rectangles inside shown Cogs. Each of the four internal Cogs represent one BS2. Wiring shown is an array ready for parallel connections. Keeping in mind there's Propeller code with a degree of compatibility with the BS2 in the OBEX, the Retro Perspective is traveling back to visit Bean's 2009 Propeller based BASIC Stamp emulator. The usefulness of this development is the functionality and compatibility with the Brain Stem, a BS2 part of the Propeller brain responsible for motor control functions. In Bean's own words, "The saving grace is that you can have multiple BS2 programs running in parallel." With four cogs, the implementation of four BASIC Stamps is a possibility. THE CODE is written in Spin which completely compatible with the Big Brain.
MULTIPLE STAMPS BRAIN PROP UPGRADE MACHINE 2
In the upgrade, it requires 2 cogs to run the program - one running the spin and one running the assembly. So maybe you'll want 2 or 3 parallel programs running. I figure I'll need one cog to handle the downloading of programs and such. Plus one for the debugger. About Spin source code for BS2Prop: This program will emulate a BS2 on a Propeller chip. The propeller will wait until the Basic stamp IDE loads a program. To load a new BS2 program you need to reset the propeller chip. You cannot use the Propeller serial connection because the basic stamp IDE will reset the propeller and it won't be running when it tried to communicate. I used an additional "Prop plug" connected to pins 9 & 10. And you MUST tell the basic stamp IDE what serial port the prop plug is on, or it will scan the serial ports and reset the propeller.
http://forums.parallax.com/showthrea...l=1#post794309
Specialty Multi-Processor Stamp Series (3)
Master Offloader Machine (M.O.M.)
The Master Offloader Machine was conceived from the need to offload intensive duties of the Master Computer in the BASIC Stamp Supercomputer (BSS). MOM was the first supercomputing project to show that connecting together multiple BASIC Stamp 1s and Stamp 2 flavors was possible. Contained ten processors.
3DSC 3-Dimensional Stamp Computer
World’s first 3D Stamp Computer to explore a multi-dimensional universe. Initially designed for simple space-time simulations. Includes three networked BASIC Stamp 1’s using Dx boards. Upgraded to include two servo-driven moving cores. Many applications developed for advanced hobbyists, students, teachers, designed for classrooms, high school Physics and advanced university level experiments with sound, light, time, motion, heat, etc.
AM Algorithm Machine
 http://forums.parallax.com/showthread.php?124433-Tiny-Tester-for-Developing-Parallel-Algorithms&p=927796
http://forums.parallax.com/showthread.php?124433-Tiny-Tester-for-Developing-Parallel-Algorithms&p=927796
Tiny tester for developing parallel algorithms and running tests for much larger machines, including large Propeller based parallel cluster machines under design and construction. Two processors.
http://forums.parallax.com/showthread.php?124433-Tiny-Tester-for-Developing-Parallel-Algorithms&p=927796Tiny tester for developing parallel algorithms and running tests for much larger machines, including large Propeller based parallel cluster machines under design and construction. Two processors.
4DSC Series (2)
4DSC 4D Morphing Computer with BS2 Coprocessor #129

4DSC 4D Morphing Computer with Propeller Coprocessor #124
Spark Series (10)
Spark 1 one chip, the 1st Spark
Spark 2 2 props, 1 Proto Board & 1 in parallel
Spark 3 3 breadboarded props, inter-phase project that junctioned the development of Spark 2 and Spark 3
Spark 4 4 props, two proto boards w/2 props on ea
Spark 5 5 props stacked Proto Boards
Spark 6 6 props 3 proto boards 2 props on each
Spark 7 7 props interim machine, inter-phase junction project from Spark 6 to 8
Spark 8 8 props 4 proto boards 2 props on each, later became a Tertiary ADJUNCT
Spark 8 8 props 4 proto boards 2 props on each, later became a Tertiary ADJUNCT
Spark 9 9 props breadboarded, inter-phase junction project
Spark 10 10 props, 5 proto boards w/10 props total, led to Propalot
Propalot Series (3)
Propalot 10 props on solderless breadboard, used for prototyping projects: 1) one crystal 2) eleven crystals 3) download one at a time
4) download all at one time 5) assign unique IDs 6) various connection schemes 7) current ma consumption 8) voltage threshold operations 9) wireless functioning 10) programming 11) VGA, TV, Keyboard 12) IR tests 13) EEPROM tests 14) different layout tests 15) multiple randomness
4) download all at one time 5) assign unique IDs 6) various connection schemes 7) current ma consumption 8) voltage threshold operations 9) wireless functioning 10) programming 11) VGA, TV, Keyboard 12) IR tests 13) EEPROM tests 14) different layout tests 15) multiple randomness
 |
| Propalot 11 |
http://forums.parallax.com/showthread.php?120446-Propalot-Propeller-Computer&p=886000#post886000
IR Propalot post 10, modified Propalot, communication with infrared
UltraSpark Series (31)
UltraSpark 10 10 props, from Propalot experiments, led to PPPBs
UltraSpark 11 11 props, inter-phase junction
UltraSpark 12 12 props, inter-phase junction
UltraSpark 13 13 props, inter-phase junction
UltraSpark 14 14 props, inter-phase junction
UltraSpark 13 13 props, inter-phase junction
UltraSpark 14 14 props, inter-phase junction
UltraSpark 15 15 props, interrupted stack Proto Boards
UltraSpark 16 16 props, inter-phase junction
UltraSpark 17 17 props, inter-phase junction
UltraSpark 18 18 props, inter-phase junction
UltraSpark 19 19 props, inter-phase junction
UltraSpark 17 17 props, inter-phase junction
UltraSpark 18 18 props, inter-phase junction
UltraSpark 19 19 props, inter-phase junction
UltraSpark 20 20 props stacked
UltraSpark 21 24 props, made with PPPBs, inter-phase project
UltraSpark 22 24 props, made with PPPBs, inter-phase project
UltraSpark 23 24 props, made with PPPBs, inter-phase project UltraSpark 24 24 props, made with PPPBs, inter-phase project
UltraSpark 22 24 props, made with PPPBs, inter-phase project
UltraSpark 23 24 props, made with PPPBs, inter-phase project UltraSpark 24 24 props, made with PPPBs, inter-phase project
UltraSpark 25 25 props, made with PPPBs, inter-phase project
UltraSpark 26 24 props, made with PPPBs, inter-phase project
UltraSpark 27 24 props, made with PPPBs, inter-phase project
UltraSpark 26 24 props, made with PPPBs, inter-phase project
UltraSpark 27 24 props, made with PPPBs, inter-phase project
UltraSpark 28 28 props, made with PPPBs, inter-phase project
UltraSpark 29 24 props, made with PPPBs, inter-phase project
UltraSpark 29 24 props, made with PPPBs, inter-phase project
UltraSpark 30 20 + 10 props stacked
UltraSpark 31-39 9 machines, PPPBs, inter-phase project
UltraSpark 31-39 9 machines, PPPBs, inter-phase project
UltraSpark 40 Supermicrocontroller 40 props skyscraper, 320 cores, 6,400/8,320 MIPS
Super Boe-Bot Series (2)
Boe-Bot Brain 20 20 props as Brain on Boe-Bot
Smartest Boe-Bot 40 props, US40, 1 BOE, 321 processors total, post 478
LED Series (2)
LED Machine 32 LEDs on 32 ports, 1 prop
http://humanoidolabs.blogspot.tw/2013/07/propeller-led-machine.html
http://humanoidolabs.blogspot.tw/2013/07/propeller-led-machine.html
Prop Cogination Machine
Brain Blob Series (6)
Brain Blobatory 3 boards with 3 breadboards, 24 cores
Brain Blob 33 five boards with 33 cores
Brain Blob 49 7 boards with 49 cores
Brain Blob 81 81 cores
Brain Blob 161 21 boards, 161 cores
Mammoth Brain Blob 161 parallel computers
Twin Brain Series (3)
Brain Twin Prop post 202, 2
Twin Brain post 451, adding breadboard array to EXO
Massive Twin Brain has a Propeller side and a "computer" side, Apple Mac adds 724 processors and over 1 TeraFLOP speed, Propeller side contributes over 100 Propeller chips
2-Propellers Series (4)
Dueling Breadboards 2 props, one on ea., f/interface tests
PiggyTwins 2 props, 1 piggybacked on another
2-Proper 2 props, 1 PEK, 1 on same breadboard, 2-Prop-Experiment
Double Prop two side by side processors
Brain in a Jar Series (7)

1st Brain in a Jar First version made of a brain in a jar. Experimental version with a single chip.
2nd Brain in a Jar Second version (2 stacked props) brown label, pint size, the 1st BIAJ, won the POTW award from Parallax Inc.
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1014473#post1014473
Jar'd Brain By July 19th, 2011, the initial Propeller Brain in a Jar was expanded. Named the Jar'd Brain, the larger form jar was introduced, and a series of smaller color coded jars were added. Cap color denoted brain functionality. The design upgraded and improved the jar brain by connecting Propeller chips using sockets, with a unique mounting, thereby permitting pin to pin protection.
http://humanoidolabs.blogspot.tw/2013/10/quart-brain-in-jar.html
HALF GALLON BRAIN IN A JAR
http://humanoidolabs.blogspot.tw/2013/10/quart-brain-in-jar.html
(8 Propeller chips) A larger high level brain in a massively large half gallon Skippy peanut butter jar, with 64 computing cores. Evolved from the 1st pint sized 16 core Brain in a jar.
 BRAIN CORTEX
BRAIN CORTEX
http://humanoidolabs.blogspot.tw/2013/10/brain-cortex-machine-part-1-intro.html
Jar'd Brain By July 19th, 2011, the initial Propeller Brain in a Jar was expanded. Named the Jar'd Brain, the larger form jar was introduced, and a series of smaller color coded jars were added. Cap color denoted brain functionality. The design upgraded and improved the jar brain by connecting Propeller chips using sockets, with a unique mounting, thereby permitting pin to pin protection.
http://humanoidolabs.blogspot.tw/2013/10/quart-brain-in-jar.html
HALF GALLON BRAIN IN A JAR
http://humanoidolabs.blogspot.tw/2013/10/quart-brain-in-jar.html
(8 Propeller chips) A larger high level brain in a massively large half gallon Skippy peanut butter jar, with 64 computing cores. Evolved from the 1st pint sized 16 core Brain in a jar.

http://humanoidolabs.blogspot.tw/2013/10/brain-cortex-machine-part-1-intro.html
Bringing science fiction into reality, the Immortal Brain Cortex has no purpose in life, other than asking questions, volunteering information, and learning. It will carry on a limited conversation (sometimes talking to itself) and is designed to be immortal, providing it receives proper care and maintenance from time to time. — because you can choose to teach the machine some of your knowledge and personality, a small part of you becomes immortalized in the machine — Uses a solar panel, battery pack and super capacitor Triage Power System. Always on, thinks day and night 24/7. A precursor to mind uploading, a transference of consciousness from a human brain to an alternative medium providing similar functionality providing immortality as predicted by futurists such as Ray Kurzweil.
 Mini Brain Cortex
Mini Brain Cortex
http://humanoidolabs.blogspot.tw/2013/10/mini-brain-cortex.html
The Mini Brain Cortex in a jar was in use for about a week, until it outgrew its 1 liter jar home. The Mini was more finicky, requiring a greater attention to charging and battery care due to its smaller AA cells battery pack which contained only two batteries. it paved the way for it's bigger 3-liter sibling with immortality. Throughout its life span, it served as a prototype model and test bed for the larger cortex with greater longevity. It included a 3-volt polycrystalline solar panel and eight core Parallax Propeller chip, recharging circuit and programs in Spin language. Unlike "Brain in a Jar" the Mini Brain Cortex was able to potentially achieve great life spans due to its ability to recharge during the day and operate from batteries in the night. Ironically, it never achieved immortal status due to a major upgrade after one week.
Dupe Cortex 1 Propeller, 32K EEPROM, designed as an empty backup vessel for machine mind to machine mind transfer (mind meld) to ensure immortality of the main brain. Used as a temp holding vessel when working on the main cortex, for repairs, parts replacement, upgrades, additions or as an insurance backup. Smaller in physical size (about 320 grams jar) compared to the main brain cortex due to smaller 3V 60 mA solar panel and AA battery pack instead of D size batteries.
http://humanoidolabs.blogspot.tw/2013/11/brain-cortex-update-part-23.html

http://humanoidolabs.blogspot.tw/2013/10/mini-brain-cortex.html
The Mini Brain Cortex in a jar was in use for about a week, until it outgrew its 1 liter jar home. The Mini was more finicky, requiring a greater attention to charging and battery care due to its smaller AA cells battery pack which contained only two batteries. it paved the way for it's bigger 3-liter sibling with immortality. Throughout its life span, it served as a prototype model and test bed for the larger cortex with greater longevity. It included a 3-volt polycrystalline solar panel and eight core Parallax Propeller chip, recharging circuit and programs in Spin language. Unlike "Brain in a Jar" the Mini Brain Cortex was able to potentially achieve great life spans due to its ability to recharge during the day and operate from batteries in the night. Ironically, it never achieved immortal status due to a major upgrade after one week.
Dupe Cortex 1 Propeller, 32K EEPROM, designed as an empty backup vessel for machine mind to machine mind transfer (mind meld) to ensure immortality of the main brain. Used as a temp holding vessel when working on the main cortex, for repairs, parts replacement, upgrades, additions or as an insurance backup. Smaller in physical size (about 320 grams jar) compared to the main brain cortex due to smaller 3V 60 mA solar panel and AA battery pack instead of D size batteries.
http://humanoidolabs.blogspot.tw/2013/11/brain-cortex-update-part-23.html
Auditory Machine Series (5)
Singing Brain with amp, speakers, stereo
First Singing Automaton Machine
Speech Brain
Talking Keyboard Brain with keyboard, speakers, amp
The Amplified Brain
Specialty Brain Series (35)
Big Tiny Brain 3 Props, 3 sockets for 24 cogs
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=988558&viewfull=1#post988558
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=988558&viewfull=1#post988558
Concatenated Brain
Tiny Tim 4 props, two proto boards w/2 props on ea
Brain Tryout 15 boards
TTB Test Bed of Ten 10 props, single board
Brain Wave Monitor Machine runs with Partitions of 50 props
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1019989&viewfull=1#post1019989
Twelvenator Board of Twelve 12 props green board
Desktop Brain (post 152) #152
Optical Illusion Machine (post 170), 12 boards
Pyramid Brain (post 181), 12
1st Version Brain 1 post 184
Brain Boombox post 194, 15
The Brain 23 23 boards, post 324
Quad Brain 1 breadboard, 12 Propeller chips, 96 Cogs, 96 processors, post 502
Pent Brain five props forty cores, post 502
High Density Breadboard Machine holds 27 props
Brain Assemblage Machine 79 propeller chips
Discrete Brain using NMI
EXT Brain External brain created as a brain appendage as a supplement to a primary brain
New Brain
US40 Loan Machine
Scavenger Machine
TV Brain
Summit Brain unit functioning brain made from a PPDB that communicates with the Big Brain collective
Hosting Brain Host Brain has host boards (HomeWork Board, BOE)
Dashboard Brain Brain created with physical characteristics of a dash board instrument control panel in a landscape orientation and tilted towards the operator to facilitate wiring and control
Crystal Switching Brain
Brain Project the primary brain
Multi-Brain a brain with multi processors
Robotic Brain 1st brain operating with Brain Stem
Brain Replicant brain with groups of 3 identical units for cloning experiments
MLS Multi Level Stack 15 boards, 120 processors, three level rows
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=966821&viewfull=1#post966821
Progression Machine 1st machine to break the 40-chip Propeller barrier
The Next Generation Brain NGB increased brain size by a factor of 1,000 http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=990651&viewfull=1#post990651
 PARTIAL BRAIN CORTEX
PARTIAL BRAIN CORTEX
The Undiscovered Brain Cortex
http://humanoidolabs.blogspot.tw/2013/11/the-undiscovered-brain-cortex.html
March 2009, Humanoido used the Lab's first supercomputer to create a portion of a brain cortex and perform analysis. It used parallel boards from the BSS and ten boards from the Master Offloader Machine seen to the right in the photo.
Progression Machine 1st machine to break the 40-chip Propeller barrier
The Next Generation Brain NGB increased brain size by a factor of 1,000 http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=990651&viewfull=1#post990651

The Undiscovered Brain Cortex
http://humanoidolabs.blogspot.tw/2013/11/the-undiscovered-brain-cortex.html
March 2009, Humanoido used the Lab's first supercomputer to create a portion of a brain cortex and perform analysis. It used parallel boards from the BSS and ten boards from the Master Offloader Machine seen to the right in the photo.
Breakthrough Technology Series (4)
Little Parts Machine post 732
Machine in a Machine functioning with no parts, the injection of a software based machine into the Big Brain, contains no hardware parts
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1001094&viewfull=1#post1001094
ParaP Machine the 1st machine for experimenting with parallel-parallel, simulated two large parallel plates
AtOnce AO Machine the 1st machine for experimenting with At Once, when things happen immediately
Skinned Brain Series (2)
Outer Skinned Brain
Inner Skinned Brain
Order Machine Series (2)
Primary Brain 23 boards (21 Propeller, 2 BS), 168 Propeller Cogs, 21 Propeller chips, 2 BS Processors, 170 processors, post 502
Secondary Brain 1 breadboard, 5 Propeller chips, 40 Cogs, 40 processors, post 502
Brain Matter Injector Series (7)
BMI 2 Brain Matter Injector post 397, 2 props
BMI 3 Brain Matter Injector 3 props
BMI 4 Brain Matter Injector 4 props
BMI 5 Brain Matter Injector 5 props
First NMI 2 props
MNI Multi-Propeller Neural Injector post 396, 3 core
3 Giant Injectors
Cog Machine Series (5)
208 Brain post 466, 208 cogs
216 Cog Machine post 805, 27 Propeller chips, 216 Cogs
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1004694&viewfull=1#post1004694
The New 216 Brain post 471
634 Cog Brain one of the largest working Propeller machine of its type. It includes 79 interfaced Propellers and additional Stamps in a Multiplicity Modular Arrangement. Processor 634 Machine (170, 40, 112, 96, 216)
800 Cogger Machine post 1088, 100 props, 800 cogs
Propeller Loader Series (4)
Loader Tester Machine
Propeller Loader 3 chips
RC Loader
Dual Loader crystal or rc
Injector Experiment Machine Series (5)
Injector Experiment Machine One
Injector Two
Injector Three
Injector Four
Injector Five
Partition Machine Series (2)
Double Partition Brain
Three Partition Brain
Numerical Prop Array Series (5)
The 14 Array Machine
The 12 Array Machine
The 26 Array Machine
The 27 Array Machine
The 53 Array Machine
Brain Modules Series (5)

http://forums.parallax.com/showthrea...l=1#post977025
http://forums.parallax.com/showthread.php?127310-Robotic-Brain-Stem
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=982969&viewfull=1#post982969
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=962425&viewfull=1#post962425
The Brain Stem is made up from two boards, a BOE and a PPPB
The Brain Stem is made up from two boards, a BOE and a PPPB
Brain Base
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=962427&viewfull=1#post962427
Modular Brain 22 post 286
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=974492&viewfull=1#post974492
Flip Brain 20 boards post 240
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=970587&viewfull=1#post970587
MMA Multiplicity Modular Arrangement includes Brain Stem, Brain Base, 4 Brain SPANS, 4 Brain extensions. post 502
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=990341&viewfull=1#post990341
Brain Span Series (3)
Brain Span 3 the first 3 boards
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=963730&viewfull=1#post963730
Brain Span 4
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=967884&viewfull=1#post967884
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=968691&viewfull=1#post968691
Brain Span 6
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=967884&viewfull=1#post967884
Brain EXO Series (3)
Brain EXOskeleton 3 sides of 6 plus 2 for 20 boards (19 props, 1 stamp)
New EXO Brain post 160
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=967393&viewfull=1#post967393
Hybrid Brain Processor
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=955603&viewfull=1#post955603
Brain Offspring Children Series (18)
Bantam Brain has 3 Propeller
chips with VR cores. This bantam offspring is small in physical size
only, as its interior braining architecture includes over 3,000
processors in extreme high density. Bantam Brain is designed to fit
inside the smallest robots and can be considered a "shirt pocket" brain.
Preliminary X-Y specs log in around 2.5 x 4-inches in the first
prototype.
Child Brain 5 Props, a small brain whose sole purpose is to explore the birthing process of children offspring within the Big Brain
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain/page41
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain/page41
Baby Brain 1 Prop (Under 5
Props). The success of the Child Brain has led to the simple development
of a much smaller brain, smaller by a factor up to five times. Baby
Brain originates from the Child Brain. In fact, to make a Baby Brain,
take one Child Brain and remove anywhere from one to four Propeller
chips. The rapid config ability of the Baby Brain to add more Propeller
chips by a simple plug-in is a key feature. This is possible because
Baby Brain retains wiring and components for all chips. Baby Brain is
used for rapid testing where fewer props are needed. Future apps for the
robotic Big Brain may include dispensing the smaller Brain Clan from
the belly of the Big Brain.
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1004421&viewfull=1#post1004421
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain/page41
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain/page41
BIT Brain Interim Test Machine, 6 props
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1010373&viewfull=1#post1010373
Tiny Brain One (TBO) 1 Prop, 8
internalize processors, a tiny experimental brain in the smallest
config used as an adjunct to the Big Brain in primarily testing
communications transfer and interfacing abilities. TBO is now used as a
portable tiny brain for travel and portable work. It's prototyped on a
solderless breadboard. The smallest brain in the series of brains is the
Tiny Brain One. Much of the Big Brain test software can run on a TBO.
TBOs have one Propeller chip with eight hard processor cores. Each of
the "cog" cores in Tiny Brain One is thought of as an individual
internal chip with a four I/O pin allotment for use in multiple chip
development. TBOs are very portable, ideal for research and project
development, and set up on one solderless breadboard. These run
multiprocessor software and the full range of sensors. TBO "Internal
Chips" are theoretical 20MIPS with a shared 5MHz crystal. TBO Features: One Propeller chip, Eight Internal Setup Chips, Four pin i/o allotment per internal chip, Two dedicated hardware counters per internal chip, , Standard programming for multiple cogs, Shared 5MHz crystal, Shared 32K EEPROM, RAM, ROM, 20MIPS/Internal Chip, $1/Internal Chip Cost
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1033313&viewfull=1#post1033313
Tiny Brain Two (TB2) 2 Props
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1033313&viewfull=1#post1033313
Tiny Brain Two (TB2) 2 Props
http://forums.parallax.com/showthrea...l=1#post988558
Tiny Brain Three (TB3) 3 Props
http://forums.parallax.com/showthrea...l=1#post988558
Small Brain 5 prop chips on one board
Tiny Brain Three (TB3) 3 Props
http://forums.parallax.com/showthrea...l=1#post988558
Small Brain 5 prop chips on one board
Pint Size Brain (First born version of Brain in a Jar, led to V1 of Brain in a Jar) Experimental 2 Props in a
340 gram jar, built on a single solderless breadboard with wire jumpers
and two power rails. It has two Parallax Propeller chips mounted
piggyback. Pins, depending on the required circuit and software are
either bent up or kept in contact with the other prop to create various
interface functions. A nine volt battery fits behind the breadboard and
software can signal exampling neurons whose firing are visible through
the clear jar. The Jar Brain has sixteen cores, all of which can run in
parallel, which makes it powerful given its small "pint size." The Jar
lid is unscrewed to hookup the USB cable to load in the program. Lerner
uses PST and Life uses a TV externally. However the Nanite and code to
activate the LED can run from stored programs in the EEPROM.
http://forums.parallax.com/showthread.php?132716-Propeller-Brain-in-a-Jar
http://forums.parallax.com/showthread.php?132716-Propeller-Brain-in-a-Jar
Brain Child post 792, 5 props
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1003572&viewfull=1#post1003572
Morpher-8 1 prop that has ability to control, morph, transform using a NARO servo. A new prodigy, Morpher-8,
is capable of morphing and transforming and has access to eight RISC
processors known as Cogs in the Parallax Propeller chip world. Morpher-8
is a controller baby, already able to manipulate position in space and
time using SPIN code. It's small body interfaces to the real world with a
tiny NARA servo, the same as used in a Parallax Penguin robot.
Propeller Elf a 1 Propeller brain with no parts whose purpose is pure thought. Experiments with the Elf led to a greater study of pure thought and its implications.
Micron Propeller 1 Prop, a new small scale version of the full scale Propeller chip. How small? It's exampling prototype is 1/125th of Cog or 1/1000th of the entire chip. It's a prop that's subdivided into smaller processors. Derived from a spinoff of the Big Brain's VP technology.
http://humanoidolabs.blogspot.com/2012/02/micron-propeller.html
MC Computer 1 Prop, low power, minimum components, a computer designed for minimal computing, endured a hard drive crash and was resurrected over time. Primary purpose is to develop a school machine for minimal computing, explore the edge of computing with minimization and rock bottom pricing.
http://humanoidolabs.blogspot.com/2012/02/mc-computer-restoration.html
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1020034&viewfull=1#post1020034
http://forums.parallax.com/showthread.php?132961-Propeller-Power-Consumed-Based-on-Code&p=1020007&viewfull=1#post1020007
Shrunken Computer SC 1 Prop, low power, new advanced version of the MC Minimal Computer. Includes new photos, new software, refined and new lower power techniques. It has enhanced minimal computing features.
http://humanoidolabs.blogspot.com/2012/02/mc-computer-restoration.html
MC Computer 1 Prop, low power, minimum components, a computer designed for minimal computing, endured a hard drive crash and was resurrected over time. Primary purpose is to develop a school machine for minimal computing, explore the edge of computing with minimization and rock bottom pricing.
http://humanoidolabs.blogspot.com/2012/02/mc-computer-restoration.html
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1020034&viewfull=1#post1020034
http://forums.parallax.com/showthread.php?132961-Propeller-Power-Consumed-Based-on-Code&p=1020007&viewfull=1#post1020007
Shrunken Computer SC 1 Prop, low power, new advanced version of the MC Minimal Computer. Includes new photos, new software, refined and new lower power techniques. It has enhanced minimal computing features.
http://humanoidolabs.blogspot.com/2012/02/mc-computer-restoration.html
Propeller COSMAC Elf II 1 Prop, low power, Propeller-based emulator of the original retro Netronics Elf II microcomputer from the 1970s, front panel series of toggle switches, push-button input, 8-bit emulation. With modified Tiny BASIC from Hydra disc or early version of Tiny BASIC (Femtobasic) by Mike Green. Spinoff of the MC Minimal Computer, the Propeller ELF PE, and the Shrunken Computer.
Propeller COSMAC Elf III 1 Propeller based on the complete HYDRA board and its memory resources. Includes ASCII keyboard and Tiny BASIC similar to Tom Pittman's Tiny BASIC on the Netronics COSMAC ELF II. Runs build programs with results similar to the original. Saves programs into a card with a small SD media which can be interchanged with other cards, instead of using cassette tape. Spinoff of the Propeller COSMAC ELF II. Runs games from the vast database released for the HYDRA.
PEK 1 1 prop, used throughout Big Brain multi-prop development
Massive Machine Series (16)
Massive T1 Transposition Machine Powerful TeraFLOPS machine made by Humanoido Labs. It fits a 10x10x10 cube design with all available props. Was built up to over 1526 hardware processors plus over 800,000 VP processors added. Machine was entered into the Big Brain category of machines. See blogs for variances and additional experiments and the details leading to supercomputing status.
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1000542&viewfull=1#post1000542
http://forums.parallax.com/showthread.php?125723-Humanoido-Signature&p=939873
http://humanoidolabs.blogspot.tw/2013/02/transposition-machines.html
http://humanoidolabs.blogspot.tw/2013/02/transposition-machines.html
Massive Brain name after adding 20 boards
Prop IB Hypercomputer
MLEPS Massive Language Endowed Propeller System, a Super Language Machine 25 props. Designed for the ability to install and run over a 120 Propeller programming languages
Propeller Transition Machine PTM
Giant Brain the Blob at the largest size
iBrain most recent developed name with logo, 21 props 168 cogs
Giant Machine Brain ate all other machines
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=1001094&viewfull=1#post1001094
100+ Brain post 504
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=990638&viewfull=1#post990638
The Brain Assemblage 79 Propeller chips
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=990638&viewfull=1#post990638
The Brain Assemblage 79 Propeller chips
http://forums.parallax.com/showthread.php?124495-Fill-the-Big-Brain&p=990638&viewfull=1#post990638
Massive Brain Collective! post 619
Horribly Large Propeller Brain over 160 computers
Concatenation Machine post 530
NGB Next Generation Brain
Big Brain SuperMicroController over 1,500 computer cores
Insane Brain
http://humanoidolabs.blogspot.tw/2012/09/insane-brain.html
2,160 computer cores arranged in a Hypercube of raw thought power which can control approximately 70,000 robots. The heart of this monster system uses light to connect all computers together. Any one processor can send “light” talk to the remaining 2,159 accessible cores. Each Conductor chip controls eight internal cores and each board handles five chips. There is a master Propeller on each board. There’s 54 boards with five chips on each board. It utilizes a hybrid collective of microcontroller computers including both surface mount and dual inline packages. powerful Propeller chips made by Parallax Inc. collective holds a front end Hydra gaming board with keyboard, mouse, NTSC TV, composite video, two controller paddles, expanded flash memory, RAM, ROM, and EEPROM. The backbone is comprised of fifty-four Propeller Proto Boards and a total 270 propeller P8X32A-D40 chips. Quasi hybrid interfacing is accomplished with a new internal interfacing arrangement without wires using optical light communications arrays and nuclei in a multidimensional strata, and a direct approach to pin processing. The power processing speed exceeds a paralleled 20,800,000,000 instructions per second. To handle the results of computational thoughts, a wireless mainframe link is established to the robot. The computational programmable backbone can hold a total of well over 2 million brain instructions. (For every five multitasking paralleled brains, a complete computing TeraFlop cycle will be achieved with 11,339,200 programmable instructions, while controlling nearly half a million objects.)
Insane Brain
http://humanoidolabs.blogspot.tw/2012/09/insane-brain.html
2,160 computer cores arranged in a Hypercube of raw thought power which can control approximately 70,000 robots. The heart of this monster system uses light to connect all computers together. Any one processor can send “light” talk to the remaining 2,159 accessible cores. Each Conductor chip controls eight internal cores and each board handles five chips. There is a master Propeller on each board. There’s 54 boards with five chips on each board. It utilizes a hybrid collective of microcontroller computers including both surface mount and dual inline packages. powerful Propeller chips made by Parallax Inc. collective holds a front end Hydra gaming board with keyboard, mouse, NTSC TV, composite video, two controller paddles, expanded flash memory, RAM, ROM, and EEPROM. The backbone is comprised of fifty-four Propeller Proto Boards and a total 270 propeller P8X32A-D40 chips. Quasi hybrid interfacing is accomplished with a new internal interfacing arrangement without wires using optical light communications arrays and nuclei in a multidimensional strata, and a direct approach to pin processing. The power processing speed exceeds a paralleled 20,800,000,000 instructions per second. To handle the results of computational thoughts, a wireless mainframe link is established to the robot. The computational programmable backbone can hold a total of well over 2 million brain instructions. (For every five multitasking paralleled brains, a complete computing TeraFlop cycle will be achieved with 11,339,200 programmable instructions, while controlling nearly half a million objects.)
Medium Series (3)
Medium Brain 14 props on one board
Medium Brain 2 96 cogs
Medium Brain 224 224 cogs
Big Brain Series (4)
Big-Tiny Brain 3 sockets for 24 cogs
Big Brain 23 23 boards
Big Brain 224 224 cogs
Big Brain A massive machine brain with over 100 Parallax Propeller chips
Tiny Series (3)
Tiny Brain 1 1 prop
Tiny Brain 2 2 props
Tiny Brain 3 3 props
Brain Hemisphere Series (4)
Left Brain over 800 RISC processors
Right Brain 724 (GPU + QUAD) processors minimum
Upper Brain brain was developed into four parts. This represents the top most layer
Lower Brain brain was developed into four parts. This represents the lower layer
Hybrid Machine Series (7)
Serial Prop to Stamp
Serial Stamp to Prop
Daisy Chain
Token Ring
Parallel
Pin to Pin Prop to Prop
ParaP Parallel Parallel machine built with two Parallel Parallel Partitions and the techniques to advantage its operations
Processor VP Machine Series (1000)
machines from 2 to 1000 in increments representing a total number of machine processors with a limit of one thousand in one Parallax Propeller chip
VP1 - VP10
VP11 - VP20
VP21 - VP30
VP31 - VP40
VP40 - VP100
VP11 - VP20
VP21 - VP30
VP31 - VP40
VP40 - VP100
VP100 - VP200
VP201 - VP500
VP501 - VP1000
Little SideKick Series (3)
The Little SideKick 20 20 prop chips, 160 computers, 160 x 200 mips = 32,000 mips = 32,000,000,000 = 32 billion ips = 32 GFLOPS, 160 x 32 = 5,120 ports
The Little SideKick 20 20 prop chips, 160 computers, 160 x 200 mips = 32,000 mips = 32,000,000,000 = 32 billion ips = 32 GFLOPS, 160 x 32 = 5,120 ports
The Little SideKick 30 30 prop chips, cube closest to 3x3x3=27, 240 computers, 240 x 200 mips = 48,000 mips = 48 GFLOPS, 960 ports
The Little SideKick 40 40 prop chips, utilizing proto boards with a twin prop, 320 computers, 320 x 200mips = 64,000 mips = 64 GFLOPS, 40 x 32 = 1280 ports
Machines Recently Added (2)
PLM Propeller machine completed and mentioned at the signature link
http://forums.parallax.com/showthread.php?125723-Humanoido-Signature&p=939873#post939873
Propeller Virtual BTM Propeller machine completed - signature link
http://forums.parallax.com/showthread.php?125723-Humanoido-Signature&p=939873#post939873
Supercomputers (5)
Hybrid Big Brain Supercomputer Meets Top 500 Supercomputers List in 2011/2012
The Big Brain Supercomputer
Massive T2 Transposition Supercomputing Machine
The most powerful TeraFLOPS machine made by Humanoido Labs. Reached an equivalent supercomputing speed in 2012 comparable to the Top 500 List. A massive design with all available props and 729 added processors from Intel and AMD.
Giant RX Propeller Supercomputer Brain based on the RX
http://letsmakerobots.com/node/33818
FAKE SUPERCOMPUTER
http://humanoidolabs.blogspot.tw/2013/06/fake-supercomputer.html
The Fake Supercomputer is an interim project that transitions one project to another. The idea is to construct a small low cost portable computer that has many of the functions and architecture of a supercomputer, for the purposes of learning the realm of the parallel world. The actual fake super computer is a fully working model that includes enhancements to the Propeller chip, adds more processors and speed, adds special software, and provides a powerful programming environment. The FS is designed to have 1 to 25 Parallax Propeller chips in the Supertronic config. In the limit condition, the (25*2,720 MIPs) 68,000 MIPs machine would run in parallel and have a total of (25*32) 800 hard wired processors plus 25,000 VP processors for a total of 25,800 processors. The standard package includes the loader, enumerator, enhancer, parallel algorithm, and RTOS. In advanced versions, the RTOS is already incorporated with the enhancer.
CHERRY PIE: TINY SUPER COMPUTER WANNABE
http://humanoidolabs.blogspot.tw/2013/06/tiny-fake-supercomputer.html
For hobbyists and students who can't afford 55 million dollars for the real thing but want to build their own smaller working version for experimenting, learning, having fun and play. The Cherry Pie attempts to use techniques to super-size your existing Propeller chips, multiply their "Cogs" and make a computing machine with more power, function and intrigue! Cherry Processors are less than a penny each! This is a cute tiny parallel platform almost like the big supercomputers on the Top 500 List. It has lots of parallel cores, multi-threaded processors, it's own fully functional real time operating system RTOS (for thousands of cherry processors) and interfaces galore for nearly every imaginable configuration (parallel, serial, full duplex, half duplex, party line, one wire, etc.). It's simple, homey, and a lot like cherry pie in likeability.
Retro Supercomputers (2)
Supercomputers (5)
Hybrid Big Brain Supercomputer Meets Top 500 Supercomputers List in 2011/2012
The Big Brain Supercomputer
Massive T2 Transposition Supercomputing Machine
The most powerful TeraFLOPS machine made by Humanoido Labs. Reached an equivalent supercomputing speed in 2012 comparable to the Top 500 List. A massive design with all available props and 729 added processors from Intel and AMD.
Giant RX Propeller Supercomputer Brain based on the RX
http://letsmakerobots.com/node/33818
FAKE SUPERCOMPUTER
http://humanoidolabs.blogspot.tw/2013/06/fake-supercomputer.html
The Fake Supercomputer is an interim project that transitions one project to another. The idea is to construct a small low cost portable computer that has many of the functions and architecture of a supercomputer, for the purposes of learning the realm of the parallel world. The actual fake super computer is a fully working model that includes enhancements to the Propeller chip, adds more processors and speed, adds special software, and provides a powerful programming environment. The FS is designed to have 1 to 25 Parallax Propeller chips in the Supertronic config. In the limit condition, the (25*2,720 MIPs) 68,000 MIPs machine would run in parallel and have a total of (25*32) 800 hard wired processors plus 25,000 VP processors for a total of 25,800 processors. The standard package includes the loader, enumerator, enhancer, parallel algorithm, and RTOS. In advanced versions, the RTOS is already incorporated with the enhancer.
CHERRY PIE: TINY SUPER COMPUTER WANNABE
http://humanoidolabs.blogspot.tw/2013/06/tiny-fake-supercomputer.html
For hobbyists and students who can't afford 55 million dollars for the real thing but want to build their own smaller working version for experimenting, learning, having fun and play. The Cherry Pie attempts to use techniques to super-size your existing Propeller chips, multiply their "Cogs" and make a computing machine with more power, function and intrigue! Cherry Processors are less than a penny each! This is a cute tiny parallel platform almost like the big supercomputers on the Top 500 List. It has lots of parallel cores, multi-threaded processors, it's own fully functional real time operating system RTOS (for thousands of cherry processors) and interfaces galore for nearly every imaginable configuration (parallel, serial, full duplex, half duplex, party line, one wire, etc.). It's simple, homey, and a lot like cherry pie in likeability.
Retro Supercomputers (2)
The RS Retro Supercomputer
The RS Retro Supercomputer is made from all Parallax Propeller chips. It has over a hundred Propeller chips, including twenty Parallax Propeller Proto Boards and several large high density solderless breadboards. The purpose of the RS is experimenting and having fun!http://humanoidolabs.blogspot.tw/2012/07/retro-supercomputer.html
RX Propeller Supercomputer Retro style propeller supercomputer
http://humanoidolabs.blogspot.tw/2012/07/retro-supercomputer.html
Power Cube Super Computing Machines (4)
Propeller Power Cube 46X3D The Propeller Power Cube Computer has 97,336 hybrid processors to make a 3D 46X3D cube computer. To make the new project possible, the interesting cubed structure is folded with mathematical software inside the space within the Propeller chips, and not necessarily arranged entirely through physical hardware.
http://humanoidolabs.blogspot.tw/2012/08/super-cube-computer.html
http://forums.parallax.com/showthread.php?123828-40-Props-in-a-Skyscraper&highlight=cube+humanoido
http://forums.parallax.com/showthread.php?123828-40-Props-in-a-Skyscraper&highlight=cube+humanoido
6X3D Power Cube
a cubed machine with an XYZ geometry of 6x6x6 for a total of 216 processors
http://forums.parallax.com/showthread.php?123828-40-Props-in-a-Skyscraper&highlight=cube+humanoido
Transforming Machines (1)
TMACH
2X3D Power Cube
a cube computing machine with 8 processors.http://forums.parallax.com/showthread.php?123828-40-Props-in-a-Skyscraper&highlight=cube+humanoido
3X3D Power Cube
a cubed machine with an XYZ geometry of 3x3x3 for a total of 27 processorshttp://forums.parallax.com/showthread.php?123828-40-Props-in-a-Skyscraper&highlight=cube+humanoido
6X3D Power Cube
a cubed machine with an XYZ geometry of 6x6x6 for a total of 216 processors
http://forums.parallax.com/showthread.php?123828-40-Props-in-a-Skyscraper&highlight=cube+humanoido
Transforming Machines (1)
TMACH
A Transformation Machine, first made using the RX Supercomputing Machine. Super Computing
Machines that are large enough can transform internally and back again.
The transforming algorithm reconfigures the wiring inside the machine
with software circuits. The great advantage is one only needs to build a
massive machine and many other machines can be created from the one by a
process of internal transformation.
The SuperTronic Series of Brains (14)
The SuperTronic Series of Brain introduces Level II Enhancements. The SuperTronic takes the previous enhancements of the 32-Bit Parallax Propeller chip to the next level, incorporating more chip internal hard processors, new definitions of relative operating speed, various levels and types of processors, and a multi-chip hybrid deterministic parallel and hyper threaded environment and platform.
Supertronic Spin Brain
1 to 10 Props.
http://humanoidolabs.blogspot.tw/2013/06/supertronic-spin-brain.html
The SuperTronic 1
September 2012 - The Supertronic 1 is a powerful brain that exhibits learning and total recall, built from one enhanced Level II Parallax 32-Bit 8-Core Propeller chip. Specs: 2,720 MIPS Relative Speed *** 1,032 Total Computer Processors, 1,000 VIP processors (Threaded + Deterministic Parallel), 16 Counter Processors, 8 Cogs (RISC Processors), 8 Generator Processors, 32 Ports, 64K RAM/ROM
The SuperTronic Series of Brains (14)
The SuperTronic Series of Brain introduces Level II Enhancements. The SuperTronic takes the previous enhancements of the 32-Bit Parallax Propeller chip to the next level, incorporating more chip internal hard processors, new definitions of relative operating speed, various levels and types of processors, and a multi-chip hybrid deterministic parallel and hyper threaded environment and platform.
Supertronic Spin Brain
1 to 10 Props.
http://humanoidolabs.blogspot.tw/2013/06/supertronic-spin-brain.html
The SuperTronic 1
September 2012 - The Supertronic 1 is a powerful brain that exhibits learning and total recall, built from one enhanced Level II Parallax 32-Bit 8-Core Propeller chip. Specs: 2,720 MIPS Relative Speed *** 1,032 Total Computer Processors, 1,000 VIP processors (Threaded + Deterministic Parallel), 16 Counter Processors, 8 Cogs (RISC Processors), 8 Generator Processors, 32 Ports, 64K RAM/ROM
SuperTronic 2
2 Chips - Two 32-Bit 8-Core Level II Enhanced Propeller chips, 5,440 MIPS Relative Processing Speed *, 2,048 Total Computer Processors, 2,000 VIP processors (Threaded + Deterministic Parallel), 00048 Hard Processors (Cogs + Counters), 00032 Counter Processors, 00016 Cogs (RISC Processors), 00016 Generator Processors, 00064 Ports, 128K RAM/ROM
SuperTronic 3
3 Level II Enhanced Propeller chips, 03096 Total Computer Processors, 03000 VIP processors (Threaded + Deterministic Parallel 1000x3), 00048 Counter Processors (16x3), 00024 Cog RISC Processors (8x3), 00024 Generator Processors (8x3), 81600 MIPS Relative Speed (3x 2,720)***, 00096 Ports (32x3)
SUPERTRONIC 4
SuperTronic 3
3 Level II Enhanced Propeller chips, 03096 Total Computer Processors, 03000 VIP processors (Threaded + Deterministic Parallel 1000x3), 00048 Counter Processors (16x3), 00024 Cog RISC Processors (8x3), 00024 Generator Processors (8x3), 81600 MIPS Relative Speed (3x 2,720)***, 00096 Ports (32x3)
SUPERTRONIC 4
SuperTronic 5
5 Level II Enhanced Propeller chips, 50160 Total Computer Processors, 50000 VIP processors (Threaded + Deterministic Parallel 1000X5), 00080 Counter Processors (16x5), 00040 Cog RISC Processors (8x5), 00040 Generator Processors (8x5), Speed: 13600 MIPS Relative Speed (5x 2,720)***, 00160 Ports
SuperTronic 6
SuperTronic 7 (Dwarf Brain)
http://humanoidolabs.blogspot.tw/2012/09/small-brain.html
Specifications Chip Type - Seven 32-Bit Propeller Chips, Date Introduced - Sept. 6, 2012, Memory - 448K RAM/ROM (64K x 7), 32K EEPROM, Ports 224 I/O Ports, Speed 19,040 MIPS Relative Speed (7 x 2,720)*, Processors , 7,224 Total Computer Processors
Cube, 7,000 VIP processors (Threaded + Deterministic Parallel)
0,112 Counter Processors (16x7)
0,056 Cog RISC Processors (8x7)
0,056 Generator Processors (8x7)
Cube Root Calculator http://www.csgnetwork.com/cuberootcubecalc.html
Supertronic 8
Supertronic 9
SUPERTRONIC 10 Superior Computing Propeller Brain
Portable one board, Ten 32-Bit Propeller Chips, 640K RAM/ROM (64K x 10), 320K EEPROM (32K x 10), 320 I/O Ports (32x10), 27,200 MIPS Relative Speed (10 x 2,720)*(equal to 27.20 Billion Instructions Per Second), 10,320 Total Computing Processors, 021.80 Cubed, 10,000 VIP processors (Threaded + Deterministic Parallel), 00,160 Counter Processors (16x10), 00,080 Cog RISC Processors (8x10), 00,080 Generator Processors (8x10), 000012 Unique Byte Location Enumeration, Cube Root Calculator http://www.csgnetwork.com/cuberootcubecalc.html
SuperTronic 6
SuperTronic 7 (Dwarf Brain)
http://humanoidolabs.blogspot.tw/2012/09/small-brain.html
Specifications Chip Type - Seven 32-Bit Propeller Chips, Date Introduced - Sept. 6, 2012, Memory - 448K RAM/ROM (64K x 7), 32K EEPROM, Ports 224 I/O Ports, Speed 19,040 MIPS Relative Speed (7 x 2,720)*, Processors , 7,224 Total Computer Processors
Cube, 7,000 VIP processors (Threaded + Deterministic Parallel)
0,112 Counter Processors (16x7)
0,056 Cog RISC Processors (8x7)
0,056 Generator Processors (8x7)
Cube Root Calculator http://www.csgnetwork.com/cuberootcubecalc.html
Supertronic 8
Supertronic 9
SUPERTRONIC 10 Superior Computing Propeller Brain
Portable one board, Ten 32-Bit Propeller Chips, 640K RAM/ROM (64K x 10), 320K EEPROM (32K x 10), 320 I/O Ports (32x10), 27,200 MIPS Relative Speed (10 x 2,720)*(equal to 27.20 Billion Instructions Per Second), 10,320 Total Computing Processors, 021.80 Cubed, 10,000 VIP processors (Threaded + Deterministic Parallel), 00,160 Counter Processors (16x10), 00,080 Cog RISC Processors (8x10), 00,080 Generator Processors (8x10), 000012 Unique Byte Location Enumeration, Cube Root Calculator http://www.csgnetwork.com/cuberootcubecalc.html
The SuperTronic 12
http://humanoidolabs.blogspot.tw/2012/09/supertronic-brain.html
The SuperTronic Brain Machine is a living entity with 12,384 total computer processors on one board. It's designed for new applications that most likely no one has thought about. It takes the previous enhancements of the 32-Bit Parallax Propeller chip to the next level, incorporating more chip internal hard processors, new definitions of relative operating speed, various levels and types of processors, and a multi-chip hybrid deterministic parallel and hyper threaded environment and platform. It utilizes twelve Level II Enhanced Propeller chips with two extra for testing circuits for 112 total Cogs. The battery operated portable brain has access to distributed 768K RAM/ROM and 384K EEPROM. Relative speed of the SuperTronic Brain is a blazing 32,640 MIPS or about 33 billion instructions per second. Including four different types of processors in high densities, the brain can offer solutions for a neural injection distribution platform.
SuperTronic 100 100 Propeller chips , 103,200 Total Computer Processors, 046.900 Cubed, 100,000 VIP processors (Threaded + Deterministic Parallel), 001,600 Counter Processors (16x100), 000,800 Cog RISC Processors (8x100), 000,800 Generator Processors (8x100)
272,000 MIPS Relative Speed (2,720x100)*, 006400K RAM/ROM (64Kx100), 0003200 Ports (32x100), 0000100 Unique Byte Location Enumeration, Cube Root Calculator http://www.csgnetwork.com/cuberootcubecalc.html ***a Propeller Counter is a CPU with exactly one instruction: a conditional ADD. And there is a program memory with one long: the CTRx register. Then you have 2 working registers: PHSx and FRQx. This CPU executes the instruction with 80 MHz so we have 80 MIPS for every counter. Now the Video Generator. It has also one instruction: a Shift by one or by two. And this unit can execute this instruction with up to 160 MHz or more. So the Propeller has in total: 8 cogs with 20 MIPS, 16 counters with 80 MIPS and 8 Video Generators with 160 MIPS. 8*20 + 16*80 + 8*160 = 2,720 MIPS http://forums.parallax.com/archive/index.php/t-141840.html
SuperTronic 150
150 propeller Chips, Processors: 154000 Total Computer Processors, 150000 VIP processors (Threaded + Deterministic Parallel), 002400 Counter Processors (16x150), 000800 Cog RISC Processors (8x150)
000800 Generator Processors (8x150), Speed: 408,000 MIPS Relative Speed (150x 2,720)* Cube is ..., 004800 Ports (third partition is expandable)
Big Brain Nano Technology Machines (5)
Propeller NANO PULSAR
12.5 NS Nano Machine
http://humanoidolabs.blogspot.tw/2012/09/propeller-chip-nanotechnology-nano-probe.html
PROPELLER NANO PULSAR 2
The smallest Pulsar, a 10.0 NS Machine
http://humanoidolabs.blogspot.tw/2012/09/propeller-chip-nanotechnology-nano-probe.html
http://humanoidolabs.blogspot.tw/2012/10/nano-pulsar.html
The Time Yardstick
http://humanoidolabs.blogspot.tw/2012/09/propeller-chip-nanotechnology-nano-probe.html
Toggles time base reference Pin P1
Propeller Nano Window
http://humanoidolabs.blogspot.tw/2012/09/propeller-chip-nanotechnology-nano-probe.html
Displays binary result on Pins P0 - P31
Nano Goop
http://humanoidolabs.blogspot.tw/2012/09/nano-goop.html
http://humanoidolabs.blogspot.tw/2012/09/supertronic-brain.html
The SuperTronic Brain Machine is a living entity with 12,384 total computer processors on one board. It's designed for new applications that most likely no one has thought about. It takes the previous enhancements of the 32-Bit Parallax Propeller chip to the next level, incorporating more chip internal hard processors, new definitions of relative operating speed, various levels and types of processors, and a multi-chip hybrid deterministic parallel and hyper threaded environment and platform. It utilizes twelve Level II Enhanced Propeller chips with two extra for testing circuits for 112 total Cogs. The battery operated portable brain has access to distributed 768K RAM/ROM and 384K EEPROM. Relative speed of the SuperTronic Brain is a blazing 32,640 MIPS or about 33 billion instructions per second. Including four different types of processors in high densities, the brain can offer solutions for a neural injection distribution platform.
SuperTronic 100 100 Propeller chips , 103,200 Total Computer Processors, 046.900 Cubed, 100,000 VIP processors (Threaded + Deterministic Parallel), 001,600 Counter Processors (16x100), 000,800 Cog RISC Processors (8x100), 000,800 Generator Processors (8x100)
272,000 MIPS Relative Speed (2,720x100)*, 006400K RAM/ROM (64Kx100), 0003200 Ports (32x100), 0000100 Unique Byte Location Enumeration, Cube Root Calculator http://www.csgnetwork.com/cuberootcubecalc.html ***a Propeller Counter is a CPU with exactly one instruction: a conditional ADD. And there is a program memory with one long: the CTRx register. Then you have 2 working registers: PHSx and FRQx. This CPU executes the instruction with 80 MHz so we have 80 MIPS for every counter. Now the Video Generator. It has also one instruction: a Shift by one or by two. And this unit can execute this instruction with up to 160 MHz or more. So the Propeller has in total: 8 cogs with 20 MIPS, 16 counters with 80 MIPS and 8 Video Generators with 160 MIPS. 8*20 + 16*80 + 8*160 = 2,720 MIPS http://forums.parallax.com/archive/index.php/t-141840.html
SuperTronic 150
150 propeller Chips, Processors: 154000 Total Computer Processors, 150000 VIP processors (Threaded + Deterministic Parallel), 002400 Counter Processors (16x150), 000800 Cog RISC Processors (8x150)
000800 Generator Processors (8x150), Speed: 408,000 MIPS Relative Speed (150x 2,720)* Cube is ..., 004800 Ports (third partition is expandable)
Big Brain Nano Technology Machines (5)
Propeller NANO PULSAR
12.5 NS Nano Machine
http://humanoidolabs.blogspot.tw/2012/09/propeller-chip-nanotechnology-nano-probe.html
PROPELLER NANO PULSAR 2
The smallest Pulsar, a 10.0 NS Machine
http://humanoidolabs.blogspot.tw/2012/09/propeller-chip-nanotechnology-nano-probe.html
http://humanoidolabs.blogspot.tw/2012/10/nano-pulsar.html
The Time Yardstick
http://humanoidolabs.blogspot.tw/2012/09/propeller-chip-nanotechnology-nano-probe.html
Toggles time base reference Pin P1
Propeller Nano Window
http://humanoidolabs.blogspot.tw/2012/09/propeller-chip-nanotechnology-nano-probe.html
Displays binary result on Pins P0 - P31
Nano Goop
http://humanoidolabs.blogspot.tw/2012/09/nano-goop.html
Extremely Powerful Telescopes (12)
ULT ULTRA LARGE TELESCOPE
http://humanoidolabs.blogspot.tw/2012/03/nult-new-ultra-large-telescope-home.html
Feb 27, 2012, Aperture 24-meters, Features: Symbiotic Earth Space Telescope, Mobile to change positions in the solar system, UP Universe Penetrator, MMS Multi Mag Slider, 94 swarming Adjuctive Arrays, 724 processors. Discoveries: Found Saturnian Rocks, Discovered Multi Storms inside the GRS, Ultra Deep Imaging, Penetration to over 13 Billion Light Years, Near the Edge of the Universe Boundary (EOU), Penetrated the Globular Stellar Abyss, the Farthest Two Galaxies at the Edge of the Universe, Deepest Galactic Penetration into 2.6 Million LY Zone, Planet Outside Our Solar System, Pluto Detail Imaging, Multi-Meter Lunar Res with Lunar Adjunctive, Experimental, Inventive, Exploratory, Breaking New Technology, Relatively Easy to Use, Big Brain Enabled.
NULT NEW ULTRA LARGE TELESCOPE
http://humanoidolabs.blogspot.tw/2012/02/new-ultra-large-telescope-nult.html
First Light March 27th, 2012 (farthest known galaxy in the Universe)
http://humanoidolabs.blogspot.tw/2012/02/penetrator_27.html
Aperture 945-inch. Features: Big Brain Penetrator, 101,500 processors, Higher Resolution, greater storage, New Accumulator and HUD Heads Up Display, Adjunctive Array & Repeatability, Can be in multiple places at the same time, super computer driven
GT GENIUS TELESCOPE
http://humanoidolabs.blogspot.tw/2012/06/gt-genius-telescope.html
First Light June 6th, 2012 (Transit of Venus)
http://humanoidolabs.blogspot.tw/2012/06/gt-genius-telescope.html
http://humanoidolabs.blogspot.tw/2012/06/gt-telescope-venus-transit-first-light.html
Aperture(s) 1.5-mile, 15-miles, 150-miles. Features: TMA Tri Mode Aperture, VARUP Variable Universe Penetrator, FUP Factorial Universe Penetrator, Expanded Adjunctive Multiple Array, GTA Genius Telescope Accumulator, HUD Heads Up Display, Location Entanglement, Discoveries: June 8, 2012 GT Telescope Venus Transit First Light http://humanoidolabs.blogspot.tw/2012/06/gt-telescope-venus-transit-first-light.html
July 13th, 2012 Sun Edge Reveal
http://humanoidolabs.blogspot.tw/2012/07/suns-edge-reveal.html
September 9th, 2012 Black Hole Event Horizon
http://humanoidolabs.blogspot.tw/2012/09/black-hole-event-horizon.html
PGT PARADIGMIC GENIUS TELESCOPE
http://humanoidolabs.blogspot.tw/2012/09/paradigmic-gt-telescope.html
First Light Sept. 10th, 2012
http://humanoidolabs.blogspot.tw/2012/09/paradigmic-gt-telescope.html
Aperture 7,000 miles. Features: MAC Multiple Adjunctive Concatenation, Molecular Stage Cascader, CSW Character Selection Wavelength, Interferometry. Discoveries: 101512 M42 Orion Nebula
http://humanoidolabs.blogspot.tw/2012/10/m42-pgt-paradigmic-genius-telescope.html
MGT Molecular Genius Telescope http://humanoidolabs.blogspot.tw/2012/10/big-brains-new-paradigmic-molecular.htmlOctober 17th, 2012, Aperture: Enhanced PGT to over 7,000 miles. Features: Interim Testing Scope, MAC Molecular Amp Cascader & Processor, Pipe Fitting Atop the PGT Telescope, Transformation Telescope from PGT to PGT-ET
PGT-ET PARADIGMIC GENIUS TELESCOPE ENHANCED TECHNOLOGY
http://humanoidolabs.blogspot.tw/2013/03/pgt-telescope-new-look.html
The PGT-ET is a Paradigmic Genius Telescope with new Extreme Technology enhancements. This includes merged technology from the GMM Genius Molecular Microscope. The telescope employes the Big Brain Supercomputer and has over 78 incorporated controls. As of March 30th, 2013, the PGT-ET is the most powerful telescope ever created by the Big Brain's Science Initiative. The PGT-ET is one of five telescopes in the Adjunctive series, which can be in two places at the same time. The others include the ULT, NULT, GT, and PGT.
Discoveries:
Mars Volcano Olympus Mons
http://humanoidolabs.blogspot.tw/2013/04/pgt-et-telescope-mars-mt-olympus.html
The Edge of the Universe
http://humanoidolabs.blogspot.tw/2013/04/pgt-et-telescope-edge-of-universe.html
Dragon Head Nebula
http://humanoidolabs.blogspot.tw/2013/04/pgt-et-telescope-dragon-head.html
New Stars
http://humanoidolabs.blogspot.tw/2013/04/pgt-et-telescope-stars.html
Ring Nebula Cosmic Striations
http://humanoidolabs.blogspot.tw/2013/04/pgt-et-v.html
Crab Nebula
http://humanoidolabs.blogspot.tw/2013/04/pgt-et-test.html

http://humanoidolabs.blogspot.tw/2013/04/new-telescope-announcement.html
To date, the Power Dynamic Telescope is the most powerful Adjunctive telescope ever designed and constructed by the Big Brain Initiative. With the largest budget, the most agency support on board, and over 140 specialized controls, it set records and discoveries during First Light. Designed to investigate black holes, the time continuum, and relativistic causal effects leading to a journey beyond the edge of the Universe' singularity. With thousands of miles aperture, it can exist in two places at the same time with Enhanced Entanglement. Key conceptions include 01)Paradigmic, 02) Adjunctive , 03) Molecular, 04) Quantum, 05) Analyzer Head, 06) New Control Panel , 07) Wavelength Variablizer, 08) Power Dynamic, 09) Supercomputer Driven, 10) Morphable , 11) Entanglement Enabled, 12) Focalization Reductive.
First Light April 21st, 2013 (Gravitational Black Hole)
http://humanoidolabs.blogspot.tw/2013/04/power-dynamic-telescope-first-light.html
Aperture: 9 billion miles. Features: Morphable Configuration Array Telescope, 142 Advanced controls
http://humanoidolabs.blogspot.tw/2013/04/power-dynamic-telescope-updated-controls.html
Electric Barlow Enhancement, FORE Focalization Reductor, SUM of all previous Adjunctive telescopes and the GMM Molecular Microscope. Discoveries:
Pinpointing a Singularity
http://humanoidolabs.blogspot.tw/2013/05/pinpointing-singularity.html
Two Edges Universe
http://humanoidolabs.blogspot.tw/2013/05/two-edges-universe-unfolding.html
Black Hole Floaters and Red Matter
http://humanoidolabs.blogspot.tw/2013/04/black-hole-floaters.html
Strange Object Inside Black Hole
http://humanoidolabs.blogspot.tw/2013/04/object-inside-black-hole.html
Black Hole Contort Space
http://humanoidolabs.blogspot.tw/2013/04/black-hole-heart.html
Through the Center of the Ring Nebula
http://humanoidolabs.blogspot.tw/2013/04/power-dynamic-telescope-pdt-through.html
Resolution of Red Super Giant Star
http://humanoidolabs.blogspot.tw/2013/04/power-dynamic-telescope-pdt-sees-syper.html
Journey to a Gravitational Black Hole
http://humanoidolabs.blogspot.tw/2013/04/power-dynamic-telescope-first-light.html
GGT Gargantuan Gravatomic Telescope
http://humanoidolabs.blogspot.tw/2013/05/next-telescope.html
May 6th, 2013 Introduced, Aperture: Possible Interfero-Gravitometric diameter to the edge of the Universe exceeding width of Solar System. Number of Controls: est 200 - see PDT list plus additions. Features: 1st Gravatomic Telescope. Discoveries: Melting time & space
GGT Gargantuan Gravatomic Telescope
First Light GGT Gargantuan GravAtomic Telescope
Gravatomic Machine
Age of Gravatomic
GGT Faceplate Control Icon Rework
Telescope Icons
Meltdown of Space & Time
SRT - Space Recycler Telescope
http://humanoidolabs.blogspot.tw/2013/05/novel-space-junk-telescope.html
The SRT generally uses one Adjunct and its data sets are more time dependent. The telescope can focus attention on what to observe and when to observe. This SRT is the most simple telescope in the series - and it's powerful as it can have an aperture diameter exceeding the largest Earth-based telescopes. It has the most basic controls and the most simple methodology of operations. To keep things simple, telescope linking is unary and the process of data mining is fundamental. Refer to the Face Plate showing control icons. Cutting edge work: the Planet Saturn
Space Recycler Telescope SRT
MMT - Molecular Mining Telescope
http://humanoidolabs.blogspot.tw/2013/05/mgt-molecular-cradle-of-stars.html
May 20th, 2013. The new MMT Molecular Mining Telescope is now dedicated to Molecular mining of the Universe and beyond. The idea to pipe mount the Molecular Device from the GMM Genius Molecular Microscope onto the GT Genius Telescope was one of the best ideas in the Big Brain's Space Initiative. This led to Mining in the Universe with a new kind of molecular mode, which has revealed spectacular results and many new discoveries, providing a high level of exploration and continued discovery. The MMT telescope is configured with several key features: Adventure and Explorer Class Modes, Molecular Device, Adjunctive, Genius, Supercomputer, ET Enhanced Technology, Paradigmic and Power Dynamic.
MMT Molecular Mining Telescope Horsehead Nebula
MMT Molecular Mining the Cradle of Stars
IET - Inference Engine Telescope
http://humanoidolabs.blogspot.tw/2013/05/iet-interference-engine-telescope-first.html
May 20th, 2013. The IET is a full scale Expert Forward Inference Engine telescope. First Light imaged inside a Black Hole. New discoveries: 1) Perimeter Molecular Energy Spicules, 2) Lenticular Distributed Elliptical Energy, 3) Nodal Matter Rings. The IET primary feature: Expert Forward Inference Engine, offers elements of idea, creativity, vision, innovation, reasoning, interpolation, extrapolation, etc. The telescope's Engine can explore the 6th dimensional element of Imagination Power. No other telescope has this function. In Quantum Physics, the act of observing and thinking about something can effect and alter it significantly. The outward execution of imagination may directly or indirectly involve in affection of some types of matter, space, time, and/or reality. The Expert Inference Engine is ideally poised to continue such experiments and missions and has led to studies of Altercated-Alternated Reality.
IET Inference Engine Telescope First Light
IET Inference Engine Telescope Construction
New Expert Inference Engine
Inference Engine Icon
M3T Massive Molecular Mining Telescope
http://humanoidolabs.blogspot.tw/2013/11/m3t-telescope-first-light-saturn.html
http://humanoidolabs.blogspot.tw/2013/11/massive-molecular-mining-telescope-m3t.html
http://humanoidolabs.blogspot.tw/2013/11/m3t-massive-molecular-mining-telescope.html
The new Massive Molecular Mining Telescope, the 12th telescope addition to the extremely powerful telescope array, has the largest Power Dynamic Face Plate ever created (as of 11.27.13). This telescope is known as M3T. First Light on Tuesday November 26th, 2013 focused on the planet Saturn. A glorious ring system appeared through the amplified molecular particle dynamic quanta. The intent was to image the spherical globe through rings, however the emergence of the reveal showed far more discoveries than expected.
This is now the largest and most powerful telescope in the array of very powerful telescopes. In particular, it's capable of massive molecular mining. The first light object chosen is the Saturn system, including the globe, cast shadows, and ring systems.
Other Telescopes (3)
FPT FIFTY INCH PINHOLE TELESCOPE
http://humanoidolabs.blogspot.tw/2013/04/ftp-fifty-inch-pinhole-telescope.html
The 50-inch FPT is one of the largest and best performing pinhole telescopes in the Big Brain project's array. It's a vastly improved version that can visually or photographically image celestially brighter objects in not only higher resolution but greater image scale. Improvements include: Image Size: Telescope size is directly related to its image scale, Resolution: Res is improved by a high definition forming surface, Contrast: Structurally closed enclosure increases contrast. Structural: Built with extra heavy duty free water boxes, Imaging: Digital camera imaging is introduced to ISO 12,000, Distortion: No lens keeps center line images sharp.
FLAT TELESCOPE
http://humanoidolabs.blogspot.tw/2013/04/flat-telescope.html
Highly experimental, the telescope is made with a single flat very thin mirror that acts as the primary objective to "project" the celestial image at a great distance to the target. The amount of slight flexure sets the LFL long focal length. The Flat Telescope is a spinoff of the pinhole telescope which also projects the celestial or terrestrial image.
TINY SPACE TELESCOPE
http://humanoidolabs.blogspot.tw/2013/04/making-tiny-space-telescope.html
http://humanoidolabs.blogspot.tw/2013/04/making-tiny-space-telescope.html
A Tiny Space Telescope built Canon digital camera parts with CCD sensor elements and anti-motion correction mechanics. Convex lenses from small telescope oculars and reading glasses were recycled into the telescope. Next, the telescope was configured, for use as a telescope, by setting the lenses for the maximum focal length. A small tripod mount is attached for mass ballast movement in alt-azimuth and for mount stability. Preconfiguring can also set the ISO to 28,000 for deep sky penetration.
 Molecular Microscope Machines (2)
Molecular Microscope Machines (2)Microscopy Initiative Microscope MicroIM
http://humanoidolabs.blogspot.tw/2012/09/genius-molecular-microscope-gmm.html
A Molecular Microscope in Black & White mode. Uses the Big Brain Supercomputer
Genius Molecular Microscope GMM
http://humanoidolabs.blogspot.tw/2012/09/genius-molecular-microscope-gmm.html
Uses the Big Brain Supercomputer, color or B&W
Interesting Invention Machines (4)
Telescope Paradigmic Light PL
http://humanoidolabs.blogspot.tw/2012/10/paradigmic-light.html
Accentuated Paradigmic Light
http://humanoidolabs.blogspot.tw/2012/10/accentuated-paradigmic-light.html
Transported Paradigmic Light
http://humanoidolabs.blogspot.tw/2012/10/teleportation-of-paradigmic-light.html
Thought Processor (the fifth dimension)
http://humanoidolabs.blogspot.tw/2012/10/thought-processing.html
Quantum Machines (4)
 QuadLyzer - Tower Design
QuadLyzer - Tower Designhttp://humanoidolabs.blogspot.tw/2012/10/quadalyzer-quantum-analyzer.html
Four parallel BASIC Stamp Homework Boards stacked cluster network to perform deterministic reflective tasks for quantum mechanics
QuadLyzer - EXOskeleton Design
http://humanoidolabs.blogspot.tw/2012/10/quadalyzer-quantum-analyzer.html
Four parallel BASIC Stamp Homework Boards EXOskeleton form factor cluster network to perform deterministic reflective tasks for quantum mechanics

A new version QuadLyzer with an extended 4-Bit Bus. The 3-Bit Bus exists on the previous machines. The new machine is designated as the QuadLyzer SE with a 4-Bit I/O Bus. Note, currently all versions have the split 8-Bit Parallel Bus. The new port gain comes from interfacing the LCD directly to Party Line pin 0 so that it may listen in on conversations from all processors.
 Q MACHINE
Q MACHINEThe QuadLyzer project was upgraded to the new Q Machine. Known simply as the Q, it introduces new software and techniques in the determination and simulation of quantum effects, particularly with four dimension of quantum sump and reflection. The Q has improvements in design over the QuadLyzer. For example, the enumeration circuits are removed and enumeration takes place with software and it introduces reductive Schrödinger equations and algorithms. It has the following related links:
- Q Machine Q&A
- Quantum Effect Study with the Q Machine
- 2Q Machine Spin
- Expanding Q Cores
- Quantum Era
- Q Machine
Other Machines (5)
Adjunct 009
http://humanoidolabs.blogspot.tw/2012/02/propeller-elf.htmlTiny one chip design that led to the Elf, a pure thinking machine made with one Propeller chip
The Dwarf Brain
http://humanoidolabs.blogspot.tw/2012/09/small-brain.html
A SuperTronic style brain with Seven Propellers, 1 board, 224 I/Os, with 19,040 MIPS relative speed and 7,224 combined processors. Contains Level II enhancements from the SuperTronic era and runs in deterministic parallel. Served as a smaller brain to test out Level II features on a desktop. It helped pave the way in the determination of the viability of smaller but more powerful brains in humanoid robots.
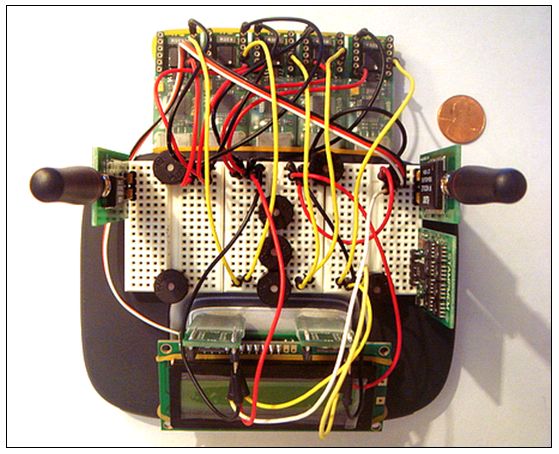
http://humanoidolabs.blogspot.tw/2012/02/fake-prop.html
Application of the TSS Tiny Stamp Supercomputer. Emulates simple exampling parallel functions of a Propeller chip by connecting together a cluster of Basic Stamp processors. Each Stamp represents one Cog, has its own operating program and communicates through a common BUS using PBASIC programming language. Output is to a built-in green screen LCD monitor. Unlike the real Prop, the Fake Prop can be rewired in between its Cogs.
THE TURBONIZER
http://humanoidolabs.blogspot.tw/2013/04/basic-stamp-hacking.html
A BASIC Stamp that can run 2 times and 4 times faster than the original Stamp.
PROJECTED MAPPING DEVICE
http://humanoidolabs.blogspot.tw/2013/06/projected-mapping.html
A device to transfer, map and project controls from a boiler face plate to the actual functions for operating the Altercated-Alternated Reality Machine (AAR) and other machines. To go from 3D representations on a planar surface that exist only in code or that which is brought into graphical representations, to that which exists only inside the mind as thought, i.e. in these examples, the mind of the supercomputer or the mind of a human transfer agent. The projection is then linked to the actual function and the function is carried out. In this manner, full thought control panels containing arrays of function switches can be implemented.
Monster Machines (6)
Gravatomic Monster Machine
http://humanoidolabs.blogspot.tw/2013/05/gravatomic-machine.html
The G machine works in several ways. By setting gravitometric data based on point to point observations of objects undergoing space time specific gravity wave transforms and comparing to the most massive positional changes and object reformations with a cache of scattered scale reference objects, relative static devices, a scale of gravitometric lensing foci imaging and mapping is achieved. This is used to forward the image of the causation source resulting in imagery when pipelined to/from a telescope such as the new GGT. How fast can the G Machine work? The machine is now in the testing phase and more information will become available. The G machine uses several constructs and it will take time to test and experiment with each.
M3 Molecular Monster Machine
http://humanoidolabs.blogspot.tw/2012/10/big-brains-new-paradigmic-molecular.html
The M3 machine is capable of transforming a view of an object, space, time, or a dimensional section of the universe into moleculars.
Genius Molecular Microscope GMM
http://humanoidolabs.blogspot.tw/2012/09/genius-molecular-microscope-gmm.html
GMM Genius Molecular Microscope Diagram
http://humanoidolabs.blogspot.tw/2012/10/gmm-genius-molecular-microscope-diagram.html
Powerful Microscopes
http://humanoidolabs.blogspot.tw/2012/09/microscopes.html
MGT Molecular Genius Telescope
http://humanoidolabs.blogspot.tw/2012/10/big-brains-new-paradigmic-molecular.html
MGT Molecular Cradle of Stars
http://humanoidolabs.blogspot.tw/2013/05/mgt-molecular-cradle-of-stars.html
Molecular Microscopy Initiative
http://humanoidolabs.blogspot.tw/2012/09/molecular-microscopy-initiative.html
Molecular Stage Cascader
http://humanoidolabs.blogspot.tw/2012/10/molecular-stage-cascader.html
Expert Inference Engine Monster Machine
http://humanoidolabs.blogspot.tw/2013/05/new-expert-inference-engine.html
The Inference Engine machine creates new views of the universe and new worlds based on functions with factors that include experience, ideas, motivation, will, creativity, vision, focus, innovation, reasoning, knowledge base, brain, forward chaining, backward chaining, interpretation, interpolation, extrapolation, weight, resolution, conditions, rules, techniques, interface, memory, integration, agents of change, consultation elementals, links, creation, automation, revision, design, control, analyze, statistics, event processing, visual, intelligence, logic, deployment, recognition, cognition, scheduling, consistency enforcer, production architecture, cycler, and processing.
The AAR Altercated-Alternated Monster Machine
http://humanoidolabs.blogspot.tw/2013/05/aar-altercated-alternated-reality.html
http://humanoidolabs.blogspot.tw/2013/05/altercated-reality-machine.html
Alter and change visible known reality into and out of the unknown alternated state reality with this machine. Seek out new previously unknown realities — bring these into existence and explore where no one has gone before. Imagine a machine that you can turn on, calibrate, and focus on a particular reality in the Universe. Now modify the machine settings to affect the streaming input to gain a new alternate view of reality. Altered Realities have altered constructs of space, time, matter and elemental physics such as gravity, molecular structure, and inferences.
PMM Procedural Monster Machine
http://humanoidolabs.blogspot.tw/2013/06/procedural-machine.html
The procedural Machine connects and links two halves of a singular machine or links two entirely different machines. It can also link part of a machine, such as a Boiler face Plate, with controls to the main parent machine. Procedural machines have a set of procedures to follow; a step by step sequence to do the actual interfacing.
Monster Combo Machine
http://humanoidolabs.blogspot.tw/2013/06/monster-machine-combo.html
The Monster Combo Machine co-adds together signals from other Monster Machines. This machine currently allows the connective combination of 2 machines. The machine uses the standard Boiler Face Plate with an extra function switch. It may be possible in the future to combine more than two machines
New Machines (7)
SPIN BRAIN
http://humanoidolabs.blogspot.tw/2013/06/spin-brain.html
A popular
brain in the series of single board small brains for robots, humanoids, and control
projects. It accommodates from 1 up to 5 props. 6.25
Mhz crystal for performance up to 1,000 MIPs in parallel. Typical config
begins with a 5Mhz crystal deploying the Loader Chip. RC additionals
provide the lowest power consumptions for battery operated experiments
while crystals enable the highest speed performances.
BRAIN IN A BRAIN
http://humanoidolabs.blogspot.tw/2010/09/brain-build-1_13.html
Experimental 2nd brain housed inside the 1st. Serves to create multiple brains that become more powerful dedicated brains located anywhere inside the robot. The 1st brain in a brain project.
 PRE-KNITTED BRAIN
PRE-KNITTED BRAIN
http://humanoidolabs.blogspot.tw/2013/08/brain-knitting.html
Evolutionary knitted electronic brain, made from impetus Parallax Propeller microelectronics, that can predetermine its own growth destiny. One-of-a-kind experimental project, Predetermined Growth Destiny is basically putting together a structural outline of "primordial state" processors and letting the mix evolve into a brain. Photo shows the first pre knitted brain.
BRAIN IN A BRAIN
http://humanoidolabs.blogspot.tw/2010/09/brain-build-1_13.html
Experimental 2nd brain housed inside the 1st. Serves to create multiple brains that become more powerful dedicated brains located anywhere inside the robot. The 1st brain in a brain project.

http://humanoidolabs.blogspot.tw/2013/08/brain-knitting.html
Evolutionary knitted electronic brain, made from impetus Parallax Propeller microelectronics, that can predetermine its own growth destiny. One-of-a-kind experimental project, Predetermined Growth Destiny is basically putting together a structural outline of "primordial state" processors and letting the mix evolve into a brain. Photo shows the first pre knitted brain.

http://humanoidolabs.blogspot.tw/2013/08/robot-explorer-log-7.html
Special multiple Propeller powered robot with 16 processor cores, designed to explore other moons and planets. Uses many smart sensors and the Lab's unique "stuck" sensor which determines if the robot is stuck and cannot move. Made from multiple Boe-Bot kits and Parallax parts.

http://humanoidolabs.blogspot.tw/2013/08/build-tiny-stamp-boe.html
This is a tiny Board of Education made from an original OEM BS2 kit and breadboard merged together. Highly useful for development, and projects, where space is a premium. Fits into a shirt pocket.
BARE BONES
http://humanoidolabs.blogspot.tw/2013/11/bare-bones-propeller-update-v14.html
1 Prop, the most essential Propeller chip circuit. The circuit maximizes Propeller chip performance, reliability, and facilitates ease of assembly for beginners. The circuit allows lower power operations, mainly 3-volts with two (1.5 volts each) AA batteries, and experiments at lower voltages. Bare Bones is a good reference circuit and starting point for many projects. By itself, Bare Bones is considered to be a simple machine project with provided software on the schematic and the ability to communicate with a serial terminal, providing virtual representations. The program runs in rcfast (~12 mHz) and at 1200 baud to blink a serial terminal LED on and off.
CORTEX SIMULATOR MACHINE
http://humanoidolabs.blogspot.tw/2013/11/the-undiscovered-brain-cortex.html
Created 6 Feb 2007. The Cortex Simulator Project encompasses the development of a tiny machine program to emulate one facet of the human brain Cortex. This represented the first beginning work started to construct and understand a machine brain cortex. As the project was successful, the tiny machine program was expanded and developed as an application for humanoid robotics. It took a time span of almost 3 years, from 2007 to 2009 for the construction of an actual cortex that was embedded in a super computer.
Historical Additions (44)
Optronic
The ultimate in optoelectronics. A machine that transmits and receives using OPTICS language and speaks in light waves. Optical interface, CRT-driven Optoelectronic Robotic Invention.
The Talker A go between machine that could speak the language of one machine and transfer it to another machine in the second machine's native language
Thermodynamic Equalizer
A machine that thermally controls the temperature of indoors making it equal to that of outdoors within a quarter of one degree
Mirror Grinding Machine
A six foot optics grinder and polisher for making lenses, oculars and primary mirrors for large telescopes up to 40-inches in diameter. Used the kitchen clock, surplus belts and pulleys, washing machine motor, and a solid wood door
HVAC
A high voltage AC robot mechanics control, capable of switching high powered devices and inducing motion through computer programming
Robert
The 1st humanoid robot built from tin cans which could talk and say phrases in English. Built up from Campbell soup cans. Contained a head and upper body. Lower legs and torso were experimental.
Son of Robert
Interim experimental robot built after Robert
CanMan
A newer upper body humanoid robot, loaded with mechanics and electronics, contained a computer to control games, sounds, lights. Contain large chains for special apps.
VIP
6-foot Video Image Processor, could take negatives from conventional film and process it digitally. Made many astronomical discoveries, more rings around Saturn, Saturn spokes, planetary colors, image enlargement, reversal, many processing features. Built from a surplus motor, enlarger lens, hand made ball screw assembly, encased in plywood. Was published.
EZAC
Electronic Z Axis and Controller machine that added a full axis to a Japanese Panadac 273 Manufacturing Robotic Arm System and enable capacity to print and write using a special ink pen
Android Hand
Robotic Articulated ANDROID HAND created in 1986, with 15 DOF, made from aluminum, wire cable, hardware and plastics. A complete sophisticated full functional hand. Professional machine shop was unable to replicate it. Was built manually using a base of electrical supply house parts. Designed to augment humans with loss of a hand.
Embedded Micro Array
Robot embedded microprocessor motion control system
ARD
Antiforce Retention Device, locks down 44,000 pounds during tornado gale wind force
The Singer 1
A singing robot based on the Apple IIe
The Singer 2
A singing robot based on the Macintosh
The Singer 3
A singing robot based on the PC computer
Remote Robotic Cyber Space Telescope
A full scale telescope remotely and robotically controlled over the web. Took CCD images of Messier objects and selected objects. Used a choice of 2 CCD cameras and astro sky or land mode. Contained a database, star map computer, and extras
ATALF
Autonomous Talker Artificial Life Form, on its own was able to talk and talk without human intervention
Zylatron
Autonomous robot life form based on the Z80
Son of Zylatron
The robot offspring of Zylatron, smaller with the same and more functions
Automatron
Bugatron
Two servo driven programmable bug based on the Parallax OEM Basic Stamp 1 board
Megatron
Microtron
Rotation Transporter
Mechanical robot drives one ton dome
PLC
Programmable Logic Control
Security Master
Electronic device protected garage door openers from activating from false signals or activating from storms that caused power resets
CCD Eye
The first eye built from CCD sensors
RPS
Robotic Platform System, moved a device with great accuracy to match sidereal, lunar, and planetary rates
Boebot Mod
A modified Boebot robot
Toddler Mod
A modified Toddler Robot
Humanoido 1
Ongoing robot of incredible power and capability. Was later set as a continuing project. Developing humanoids, worked on various aspects of a Humanoid project since 1986
Manatron
A humanoid robot, speaks English and five foreign languages, walks, talks, dances, does Tai Chi, has moving head, torso, legs, arms, aluminum body, rechargeable, fully programmable
Ball-Screw Assembly
designed to move a negative and/or lensing system back and forth for video image process of planetary and astronomical systems
Speech Synthesis Board
techniques of hardware and software, speaking circuits using analog & digital speech fabrication in multiple languages, speech waveform analysis
Voice Recognizer
Voice recognition circuits & software, inclusive of custom digitization of analog synthesis, development of the Speech Amplifier, corresponding boards, circuits and specific programming
Speech Amplifier
Custom designed board with amplification at multiple levels to fit speech devices
Optical Matrix
New powerful optical computer matrix
PTS
Programmable Touch Screen for use on robot machines
Multi Bot
Program robot platforms with both PC's and Macintosh
Transmission Solver
Z80 program to calculate complex machine gear ratio transmissions
AIC
Artificial Intelligence Converser, enable two computer to talk to each other and carry on a conversation
ECP
Electronics Control Platform Programmable Logic Controllers
NI-PLC
New Innovative PLC, Inventor/developer of new PLCs
Software Machines (22)
ROS
Robot Operating System
CAR NAV
Computer And Robotic Navigational Assisted Vehicle
EZAC TALK
Electronic Z Axis Controller talker
TCOS
Tiny Computer Operating System
CNC-FE
Computer Numeric Control Front End
WINce RIDER
A Windows CE embedded machine that combined three programming languages into one
TALKER
The Algorithmic Language Kinematic Electro Responder
VOICE
Voice Operated Input Communications Edifice
VOS
Virtual Operating System
OPTICAL
Optical Programming Technical Integrated Computer Algorithmic Language
AIMW
Artificial Intelligence Miracle Worker
WAAT FIVE
THE ULTIMATE System
THINKING CNC OS -TCNC OS
generates its own CNC code with thought process
2-BIT INSTRUCTION ARRAY OS
for 25 Ton PLC
3D DOS
Special operating system that can handle 3D transforms
SMALL-WALK 1.0
Humanoid operating system for walking
ALGORITHMIC WALKER
Walking algorithms for humanoid and legged robots
AI Artificial Intelligence Program Machine
Extensive AI programming device on CNC industrial pick-and-place robotics
BW/Color GUI
Extensive b&w and color GUI
VRR
VR Robotics, comprehensive machine of virtual systems integrated into robotics
Visual Basic/C++ Atomizer
Multiplicity coded project in Visual Basic/C++ programming
Combiner Machine
Integrating versions of WINce for robotic front end
MY BRAIN EXTENDED
This is a software project to take a part of the human brain and transfer it to the iMac computer giving it access to the desktop and the ability to interact with its human counterpart as needed
Advanced Projects (55)
ADVANCED PROJECTS INTRAMAGNETICS
the creation of invisible components that take up little or no space on the circuit board, yet project electrical effects and means through the generation of various electromagnetic energy and particle dynamics
PARTICLE DYNAMIC GENERATOR
forms the basis of many pseudo electronic and optoelectronic components
1st MATRIX BRAIN CUBE
a three dimensional matrix cube supported by one thousand discrete optical computers serving as a humanoid brain
OPTOELECTROCOMPUTERIZATION
the conversion of hardware into pure light, saving space, weight, mass, and other effects
AI
Artificial Intelligence programming leading to new life forms
RRT
Recombant Reintegration of Technologies: combining various technologies to create one new technology incorporating the sum, and the impetus to replace formal technologies
HUMANOIDO 2
a life form in the image of human beings, the most powerful humanoid robot project ever undertaken at the lab
CRYSTAL SWITCHING
no parts to wear out
GRAVITON INFINITESIMAL DETECTOR
infinitesimal particle detector, useful in the development of a NanoBot program
MULTIDIMENSIONAL COLLECTIVE EYE
Collective eye can see in multidimensions
ANTILIGHT GENERATOR
currently developed for observatory to cancel and annihilate sulfur and mercury vapor street light pollution
TALKING ROBOTIC KNOWLEDGE BASE
containing all the worlds knowledge, comprising many volume encyclopedia sets, and able to answer questions through verbal interface
ROBOTIC UNIVERSAL LANGUAGE TRANSLATOR
unique world language translator for humanoid applications
Doctor Robot
It uses all non-invasive procedures to examine a human, without touching. In the future, not only exams but surgery as well will be noninvasive, without touching the human.
3D Computer
innovative revelation in computers, takes advantage of multi dimensional computing where not only hardware but software as well, can exist in the planes of multidimensional realms.
Brain Concatenator
This is part of an ongoing project to increase the thought abilities and brain power capacities of a single robot, autonomously
Supercomputer Linker
The device that connects one supercomputer to another and has the capacity to add on expansions, results in not only massive new power but led to new things that were never before imagined
EP
May 15th, 2007 Energy Procrastinator allows the humanoid to prevail in the best energy conditions, thereby avoiding L-B-S. Just as expected, numerous humanoid robots are now exhibiting problems in the low battery state. In the latest Robot magazine, reviews indicated the dangerous conditions that exhume resulting in servos locking in damaging positions, not to mention the potential for causing bodily harm and injury. I've blogged numerous times on this, and recently put an invention into good use that prevents this condition from happening.
Virtual CCD Cooler
RTPLR
February 19th, 2007 (Real Time) processing learning realm. The Humanoid Robotics Lab made another breakthrough today. It's now possible to improve the humanoid walking gate using an existing RTPLR (Real Time) processing learning realm. This device process learns on the fly based on FPI (Fed Parametric Information). I believe, if the success of this development continues, it will be possible to invent a VG, Virtual Gyro.
FPI
Fed Parametric Information. I believe, if the success of this development continues, it will be possible to invent a VG, Virtual Gyro.
HUMANOID MICROCONTROLLER RELIABILITY PROGRAM
Device to increase reliability in microcontroller chip technology, with several designs implemented in a minimal time frame
HUMANOID CONTROL PROGRAM
Visual software humanoid robotics control program to handle higher ordered functions in H-WYSIWYG-OS format
NEURAL NET KNOWLEDGE SCANNER
A forum member has pointed to a site regarding how a biological function can be incorporated into airplane flight. Using a different technique and extrapolating, I can see an application of processing vision in real time. If time permits, a project will be opened, either for vision multidimensional processor or for a thought processor to handle a constant motion back and forth neural net knowledge scanner.
Electric Man Formant (EMF)
February 6th, 2007 The objective is to create working library system parameters that can be called robotically in a multilanguaged environment. This may lead to the development of a new operating system (EF-OS).
EPM
Electric Parameter Morphing. One interesting aspect of EMF is the ability to morph an electric parameter. (EPM) Electric Parameter Morphing, matrice application, rotational excization, dimensional map phasing, are all mathematical transformations. However, when it becomes humanoid robotics applied science, the results are remarkable!
Brain POD
For example, in extended Brain Pods
Cortex Simulator
NNM
Neural Net Map
Idea Thought Imager
can morphed from one thought idea to the next. This can create original thoughts as part of the VTP Virtual Thought Process.
Axis Processor
1 Feb 2007 an Nth-dimensional real time processing pocket. A processing pocket can be called nearly anytime, within or outside of quadrature. It's power is distributed across a net. The advantage of this particular processor is that it can be represented upon the hardware array while using no hardware. This compresses physical space into that of a few bytes, instead of physical hardware. Specifically, the weight has essentially a zero aspect ratio and the LxWxH consumption is zero. A zero plane element in axis processing is most desireable. I'm really happy with this new development, as it will encompass massive amounts of neural processing power as well as AI crunching and the "zeroeth" dimensional noninhabitation (ZDN), while sustaining the original concepts.
Mechatron
Includes various mods for vision, infrared, sonar, speech, speech recognition, intelligent camera, accelerometer, directional sensors, skin sensors, nerve sensors, gyroscopic devices, assorted multi-miniature microcontrollers used as brain modules for higher ordered learning, and a slew of new servos.
Spatial Memorizer
Mathematical machine approach to memorizing information. It finds ways to fit memorizations into space using mathematical transformations. The device is highly useful for humanoid robots and numerous applications in AI.
ELECTRIC MAN FORMANT
Created electric formations in advanced synthetic speech synthesis, and experiments with working circuits. Details covered include qualities such as timbre, morphing of synthetics, commanding quasi properties, and numerous parameters.
ELECTRIC PARA MORPHER
The ability to morph an electric parameter is highly valued in a humanoid robotic state. There are various types of electric parameters which can be morphed. Not only in the example of controlling a quasi motion control state but that of neural connections related to thought processes.
CPS Cortex Simulator
6 Feb 2007 Project encompasses the development of a tiny program to emulate one facet of the human brain Cortex. The tiny program was expanded and developed as an application for humanoid robotics.
HUMANOID CONTROLLER
The design of a more reliable system capable of driving any required numbers of servos. The key behind the successful operations is a workable and definable parameters control panel
HUMANOID OP TABLE
for rapid and sometimes automatic repair of humanoid robots. This containment region is capable of diagnostics and retains all the elements required for successful repairs. Future improvements will include flashing update parameters screens in full color, bending light for vision in unseen places, and nodal contingency sites.
HUMANOID LIGHT BENDER
a full capable surgical device that when activated can electronically penetrate invisible sections of the humanoid to see operable sections during important surgical procedures.
THE PARAMETERS ARRAY FOCALIZER PAF
a virtual feature that, at a single focus, employs a device at the focus originator, FO, i.e. is a point of origin such as an idea or thought singularity, TS. The focalizer is capable to array the focal point, FP. Parametric arraying, PA, is a popular feature in substantiating the humanoid original thought process for self awareness, SA.
THE FOCAL STATE ENGINE
a supplemental engine for the thought processor. It was necessary to add on a focalizer during development of TP.
THE ROBOTIC DISPURSER (RD)
development project was enabled for humanoid thought engines (TE). The dispurser is fully capable of acting as initiator during the TP. This can drive the FP, pulsing it harmonically or using a feeder.
VIRTUAL GYRO
19 Feb 2007 The Humanoid Robotics Lab made another breakthrough today. It's now possible to improve the humanoid walking gate using an existing RTPLR (Real Time) processing learning realm. This device process learns on the fly based on FPI (Fed Parametric Information). VG, Virtual Gyro.
Humanoid P Trait (HPT) Device
includes the development of specific personality traits for humanoid robots.
THE INTELLIGENCE ENGINE
an artificial intelligence engine generator. This, when coupled to the Overlord System, creates artificial intelligence.
THE SPECTRAL ORIGINATOR (SO)
project is a fundamental part of the original thinking processor (OTP). It becomes the impetus driving force to generate original thought processes in humanoid robots with artificial intelligence engines.
THE OVERLORD SYSTEM
6 Mar 2007 works in conjunction with the artificial intelligence engine generator. It harbors the command structure. This is a humanoid robotics pure software systems project.
SPEECH GAMUT PROCESSOR (SGP)
a software derivative that cross platforms speech chips for analysis and determinations of humanoid robotics synthetic speech.
SPEECH PROCESSOR (SP)
a software processor to handle specific electronic speech phoneme synthesizers for humanoid robotics applications of synthetic artificial speech generation. It includes a gamut processor which cross platforms from chip to chip.
Humanoid Web Project HWP
designed to put approximately 150 web pages on the net for access. Spanning primarily humanoid robotics, it will include hardware, software, solutions, projects, AI, and numerous programming tips and inventions. Many of the inventions can be immediately implemented in humanoid robots. This will also become a test platform for net control of humanoid robotics.
COMP FOCALIZER CF
project organizes the computer into a database of all humanoid robotics information. It includes the organization of both incoming and outgoing, archive storage, and backup. Divisions include photos, urls, data, collectible info, hardware, software, firmware, routing, maintenance, utilities, inventions, and secular divisions to name a few.
HRR - Humanoid Radio Receiver
Advanced scientific radio designed to receive the humanoid radio channels.
DSA Dynamic Speech Array
Project entails a speech capabilities array, such as processing and/or unions of multiple hardware. This utilizes MCA's (Multi Chip Arrays) to simplify the device.
The MCIA, Multi Chip Idea Array
a three dimensional chip engine designed to engage a multiplicity of chips function into one. Like combining oscillators for resonances and harmonics, the MCA will combine thoughts and ideas. This is a multi tier approach, and not restricted to hardware. There is a phase of transition from hardware chip to VR chip, and otherwise.
EP ENERGY PROCRASTINATOR
Just as expected, numerous humanoid robots are now exhibiting problems in the low battery state. In the latest Robot magazine, reviews indicated the dangerous conditions that exhume resulting in servos locking in damaging positions, not to mention the potential for causing bodily harm and injury. I've blogged numerous times on this, and recently put an invention into good use that prevents this condition from happening. The EP - Energy Procrastinator allows the humanoid to prevail in the best energy conditions, thereby avoiding L-B-S.
HUMAN MIND INVENTIONS (69)
A series of human mind and thought inventions were created during a period from throughout April through September 27, 2005. A list of their names and purposes were recorded. The records were found in November of 2013, eight years later. Obviously, many of these human mind inventions directly correlate to the construction of the Big Brain and many brain related invented machines and techniques.
HUMAN MIND KNOWLEDGE COMPRESSION DEVICE
HUMAN MIND ALGORITHMS TO STORE ELECTRONIC SCHEMATICS AND DIGITAL/ANALOG DESIGNS
HUMAN MIND SCANNING DEVICE FOR MORE RELIABLE RETRIEVAL OF DATA
MIND MATH - A PAPERLESS SYSTEM
PATTERN RECOGNITION ROUTINES FOR ASIAN LANGUAGE RADICALS
METHOD FOR FASTER MATHEMATICS SOLUTIONS TO LONG NUMERICAL NUMBER LISTS
CORE PROCESSING SUBROUTINE FOR DIGITAL THINKING
HUMAN MIND KNOWLEDGE ACCESS SYSTEM WITH VIRTUAL MIND DRIVE CAPABILITIES
ALGORITHM FOR USING THE HUMAN MIND AS AN INFINITE STORAGE DEVICE
HUMAN MIND DEVICE TO GENERATE ALTERNATE REALITIES IN STRESS LAIDEN ENVIRONMENTS
PNEUMONIC MEMORY EXPANSION SYSTEM FOR THE HUMAN MIND
HUMAN MIND FOCUS DEVICE FOR USE IN MULTIPLE DISTRACTIVE ENVIRONMENTS
HUMAN MIND THOUGHT PROCESSORS TO DETERMINE SQUARE ROOTS WITHOUT A CALCULATOR
MIND METHODS TO COUNTERACT DEPRESSIVE MOODS WITHOUT PSYCHOTROPIC DRUGS
HUMAN MIND IMAGE STORAGE PROCESSOR
HUMAN MIND LENS MANAGER
HUMAN MIND STORAGE CUBE IN XYZ AXES
HUMAN MIND LIBRARY TECHNIQUE FOR RESEARCH AND DEVELOPMENT
HUMAN MIND ACHIEVEMENT VISUALIZATION TECHNIQUES
CALIBRATING FOCII OF THE HUMAN MIND LENS
HUMAN MIND TECHNIQUE AS A RELAXOMETER
BLOCKING DEVICE FOR CONCENTRATION EFFECT
VIRTUAL TRAVELER TO ACHIEVE RELAXING STATES
WHITE NOISE GENERATOR USING COMMON DEVICES
SOUND TRAINING AS A WAKE UP SWITCH
A MIND TIMING ELEMENT
HUMAN MIND CROSSOVER 200M
BIOLOGICAL THOUGHT INCREASOR
ORGANIZER FOR MIND LEVELS
CONVERSING CIRCUIT BREAKER TOPIC CHANGER
MIND TECHNIQUES IN LEARNING MULTIPLE LANGUAGES
HUMAN MIND VIEW MAP FOR CRYSTAL CLEAR THOUGHT PROCESS
A MIND FILTER FOR PURITY OF THOUGHT
MIND/THOUGHT CONSTRAST ENHANCER FOR MORE BRILLIANT THINKING
METHOD DUMPER F/SHORT TERM MEMORY
HUMAN MIND ACCESS KNOWLEDGE WORM TO EXTRACT EVERY MEMORY IN A SPECIFIC HUMAN MIND THREAD
INTERNAL PHAGE MEMORY BLOCKER
MIND AMPLIFICATION DEVICE TO INCREASE THOUGHT POWER SPECIFIC TO A SINGULARITY
MIND RELAXATION TOOL TO IMMEDIATELY CONTROL STRESS
NEW SCIENCE OF MIND FILTERS TO ENHANCE SPECIFIC THINKING
TECHNIQUE TO TRANSFER MIND INTO COMPUTER
USE OF COMPUTER AS A MIND EXTENDER
MEMORY EXPANSION PNUMONIC TO EXPAND THE HUMAND MIND USING A MICROCOMPUTER
THOUGHT PROCESS CAPTURE DEVICE TO SAVE THOUGHTS BEFORE THEY BECOME LOST
METHOD FOR DEVELOPING A HUMAN MIND TOPIC THREAD
HUMAN MIND STILL IMAGE SAVER
HUMAN MIND MOVIE STORAGE AND PLAYBACK UNIT
HUMAN MIND METHOD OF FREEZE FRAME (MOVIE)
HUMAN MIND THOUGHT FREEZE FRAMER
HIGH SPEED THOUGHT PLAYBACK
HUMAN BRAIN TIME TRAVEL MACHINE TO GO BACK TO DISTANT THOUGHTS/MEMORIES
USE OF MIND AS INVENTION DEVICE - THE CROSS FIELD ESTABLISHER
THE HUMAN MIND CREATION DEVICE (MICROCOSMOS)
YIN-YAN BRAIN FOCAL TUBE (YOU MUST EXPERIENCE THE DARKNESS TO FULLY KNOW THE LIGHT) DUALITY VISIONER
PSYCH TRICK CRIB RE OGNIZER
THOUGHT CAPIVATOR - A VESSILIOUS DEVICE TO HOLD MULTIPLE THOUGHTS SIMULTANEOUSLY
THOUGHT MIXER
THOUGHT EXPANDER
THOUGHT RECONSTRUCTION ALGORITHM
MIND TENT CONCENTRATOR TO ENHANCE THOUGHT CONCENTRATION
MIND METHOD TO INCREASE READING SPEED
THOUGHT/MEMORY PNEUMONIC TO INCREASE MEMORY VIA ASSOCIATION UNITS
ASSOCIATION ARRAY TECHNIQUE
SPEED THOUGHT PROVACATOR (SINGULAR THOUGHT IS HELD AS GATEWAY TO THROUGH PLURALITY)
COMPARATOR ENGINE
PROGRESSIVE HUMAN MIND LENS
REGRESSIVE HUMAN MIND LENS
MIND PAPER
BRAIN ORGANIZER BY INSTANTANEOUS THOUGHT XMISSION LEVELS
MIND TECHNIQUE TO RECALL THE DATABASE OF A DECEASED CLOSE FAMILY MEMBER FOR REFERENCE AND FUTURE CONVERSATION
MIND MACHINE TO RECREATE A HUMAN AS A 13 YEAR INFORMATIONAL AND RESOLUTIONARY DATABASE FOR CONSULTATION, QUESTIONING, CONVERSATION AND CHALLENGE RESOLUTION
ADDITIONAL INVENTIONS (75)
These are additional created inventions centered around the year 2005. The source is from a book authored by Humanoido.
LENSING OPTICAL ARRAY FOR MULTIPLE TRANSCEIVER DIGITAL COMMUNICATIONS IN NTH DIMENSIONAL MICROPROCESSOR REALITIES
A MECHANICAL NEW MULTIPLE LAYERED INCLINOMETER WITH ELECTRONIC SENSING SOFTWARE
NUMERICAL ARRAY APPROACH TO BASIC LANGUAGE AS AN ARTIFICIAL INTELLIGENCE PROCESSOR
ASIAN LANGUAGE TRANSLATOR PROGRAM
INCREASED DOF ROBOTICS SYSTEM (6-24 DOF)
A THREE DIMENSIONAL SUPERCOMPUTER EXPERIMENTAL DESIGN MACHINE
A CONVOLUTION FROM THREE DIMENSIONS TO NTH DIMENSIONS
A PSEUDO RANDOM NUMBER/STATE GENERATOR FOR ROBOTIC SLEEP STATES
NTH DIMENSIONAL MICROCONTROLLER NETWORK
MATRIX EQUATIONS MACHINE TO CONDENSE SIMULTANEOUS OPTOELECTRONIC PERFORMANCE IN 3D SUBSTRATES
SPACIAL MAPPING OF NTH DIMENSIONAL MICROPROCESSORS
ARTIFICIAL INTELLIGENCE SOFTWARE PROCESSOR MACHINE FOR SLEEP MODES
A NOVEL WIRED NETWORK EXPANDING RS422 STANDARDS FOR MICROCONTROLLERS
LAKOTA LANGUAGE ARTIFICIAL SPEECH SYNTHESIZER MACHINE AND SOFTWARE FOR ALLOPHONE BASED LANGUAGE GENERATION
DIGITAL LOGIC CONTROL SYSTEM FOR SIMULTANEOUS MULTIPLE SERVO END EFFECTORS
HARDWARE CIRCUIT MACHINE FOR POTENTIOMETRIC POSITIONAL SENSORS USING LOW COST COMPONENTS
POTENTIOMETRIC POSITIONAL FEEDBACK SOFTWARE MACHINE
CORE KNOWLEDGE UNIT FOR HUMAN ROBOTIC THINKING DEVICES
OS 3D ADVANCED THREE DIMENSIONAL OPERATING SYSTEM FOR SPACIAL NETWORKED COMPUTERS
SMALL LIVING SPACE ENVIRONMENTAL DESIGN MACHINE
HOUSING UNIT DESIGN PROGRAM
METHODOLOGY UNIT PROCESSOR FOR A/D SYSTEMS
COMPUTER PROGRAMMING MACHINE LANGUAGE REGISTER PROCESSOR DECODER
LIVING METHODOLOGY FOR SMALL LIVING SPACE ENVIRIONMENTS
UNIQUE ACCESSIBLE ROBOTIC INTERFACE
BIT STRUCTURE PROGRAMMING ALGORITHM
INTERNAL CORE MEMORY PROG DEVICE
ON-THE-FLY CORRELATOR FOR AD HOC
ADVANCED VI (VIRTUAL INSTRUMENTATION) SYSTEM ON MOBILITY DEVICES
PARTICLE COMPONENT ADVANCEMENT TO A NEW CREATED FIELD OF PARTICLE DYNAMICS
UNIQUE METHOD TO INTERFACE HITACHI CONTROLLER LCDS TO MPU DEVICES
VIRTUAL SCREEN DEVICE FOR SINGLE LCDS
SCALED ANTHROPOMORPHIC DEVICE
LCD AS VR DEVICE SOFTWARE INNOVATION
SCRIPTED ROBOTIC CHOREOGRAPHED ROUTINES IN ADVANCED TRAINING OF CHINESE TAI CHI FLOW MOTION
LOW COST MECHANICAL FILING SYSTEM
MULTIPLE REGISTER TRANSLATIONAL ALGORITHM
ONE WIRE NETWORK FOR MCU'S IN BOARD POPULATED PROXIMITY
SIMPLE MASTER/SLAVE NETWORK FOR MINIMAL F84 NODES
OPTOCOUPLER DEVICE FOR USE IN DIMENSIONAL LENSING COMPUTERS
ADVANCED OPTONETWORK PROTOTYPE
OPTONETWORK COMMUNICATIONS PROTOCOL
MECHANICAL INFINITESIMAL STORAGE PARAMETER FOR FINITE SPACE
HIGH DESIFICATION TECHNIQUE FOR MCU EXPANSION AT BOARD LEVEL
3D NETWORK PROCESSOR FOR INCREASED THROUGHPUT
SIMPLE METHOD OF OPTOCOUPLING IN NTH DIMENSIONS
ELECTRONIC AND VR MATRIX COMPONENT TO HOLD TRANSITIONING PROGRAMMING
OPTOELECTRONIC INTERFACE FOR HIGH SPEED PROGRAMMING TRANSMISSION
OPTOCOMMUNICATOR FOR A HYBRID MICROCONTROLLER
NONLINEAR OPTICAL NETWORK EXPERIMENTAL UNIT
BOOLEAN ALGEBRAIC EXPRESSIONS FOR MICROCONTROLLER ROUTINES
MULTIPLE COEXISTING ARRAYS IN LENSING INTERFACED ENVIRONMENTS
ELECTRONIC ENGINE HARMONIC OSCILLATORIAL
ELECTRONIC ENGINE AMPLIFIER TO DOUBLE/TRIPLE OUTPUT
ASTROMETRIC WINDOW MAP
MATHEMATICAL THREADED INTERFACE NETWORK FOR CUBED DENSITIES
GROUP MASTER SLAVE INTERFACE NETWORK FOR CUBED DENSITIES
OPTICAL IMAGE FLASHING NETWORK FOR CUBED CUBED MICROPROCESSOR ENVIRONMENTS
HOLOGRAPHIC LINKED MICROCONTROLLER THREE DIMENSIONAL NETWORK
SIMPLE SOLAR OVEN USING COMMON MATERIALS
MATHEMATICAL METHOD OF ADDING NUMBERS AND GROUIPING TO ACHIEVE MULTIPLICATION OF NUMBERS IN INTEGER BASIC MPU'S IN RAPID TIME
METHOD TO MINIMIZE NEEDLE PAIN IN DIABETICS
STRUCTURE TECHNIQUE IN THE WRITING OF COMPUTER PROGRAMS
TECHNIQUE FOR MORE EFFICIENT SUBR GENERATION
NETWORK ENVIRONMENTAL CHAMBER FOR DATA FLOOD EFFECT
NETWORK ENVIRONMENTAL CHAMBER FOR SIMULTANEOUS NODE INITIALIZATION
OPTICAL SERIAL DATA FLOODER
FREQUENCY SIMULCASTER TO DISTRIBUTE DATA AND PROGRAMMING IN OPTICAL AND EM NODES
CLOCK DRIVE SOLAR ARRAY FOR NIGHT TRACK OF SIDEREAL OBJECTS
PORTABLE CAR TRUNK OBSERVATORY FOR REMOTE CELESTIAL STUDY AND ASTROPHOTOGRAPHY
AIR CONDITIONER MADE FROM WATER AND SIMPLE COMPONENTS
TOWELING METHOD FOR EXCESSIVE HEAT ENVIRONMENT SURVIVAL
A MORE SIMPLE ECONOMIC HEATER TRIM DESIGN
PCB TO HOLD APPROXIMATELY 10 MCU'S IN PRENETWORKED ENVIRONMENT
DISCARDED PEN AS MECHANICAL PARTS REPAIR PACKAGE
MEDICAL INVENTIONS (31)
EEPROM AS RAM EYE
SIMPLE ARRAY FOR A HUMAN EYE
MATHEMATICAL DIMENSIONAL DISTANCE ALGORITHM USING TWO ARTIFICIAL EYES
A SEEING EYE CANE FOR THE BLIND
AN ARTIFICIAL ROBOTIC SEEING EYE DOG EQUIVALATOR
CLARITY ENHANCER FOR VISUALLY IMPAIRED
ELECTRONIC EYE/VISION ENHANCER
QUICK VISUAL FIX FOR LOST GLASSES
LENSING APERTURE TEST DEVICE FOR QUICK VISUAL FIXER
METHOD OF ADAPTATION FOR ALLERGENIC SOAP
MECHANICAL LINKAGE FOR TWO EYES
TWO EYE LINKAGE MOVER USING INSULATED MUSCLE WIRE
IMPROVEMENT TO MULTIPLE FR GLASSES
MIRROR GLASSES TO IMPROVE NIGHT VISION
GIMBAL MOUNT FOR ARTIFICIAL HUMAN EYE
METHOD TO STOP OR REDUCE THE PROGRESSION OF BLINDNESS IN DIABETICS WITH DIABETIC RETINOPATHY USING A MEDS APPROACH
BLOOD SUGAR REGULATION RATIOS
METHOD TO STOP OR REDUCE BLINDNESS DUE TO DIABETIC RETINOPATHY USING A GENE TECHNOLOG/INJECTION APPROACH
A/D INTERFACING F/3D OPTICAL COMPUTER ARTIFICIAL EYE
MICROMINIATURIZED VISION SYSTEM FOR THE BLIND
ELECTRONIC GYROSCOPIC WHEELCHAIR STABILIZER
VISION AMPLIFIER FOR THE VISION IMPAIRED
PORTABLE TACTILE SENSOR AMP FOR DIABETIC NEUROPATHY PATIENTS
ROBOTIC HELPER ROUTINES FOR HANDICAPPED
MECHANICAL/ROBOTIC MOBILITY EXERCIZOR FOR THE PARALIZED
SMALL VERSION HUMANOID ROBOT TO HELP ELDERLY AND HANDICAPPED
SOFTWARE MEMORY UNIT & ROBOTIC MEDS DISPENSER FOR THE ELEDERLY
ANTHROPOMORPHIC ARTIFICIAL INTERFACE FOR ARM AND LEG AMPUTEES
ENVIRONMENTAL SENSING ARTIFICIAL FOOT PARAMETER
IMPROVED WHEELCHAIR DESIGN FOR STABILITY
NEW SOFTWARE APPROACH TO CREATING VR ENCODER AND DECODER DEVICES FOR THE PARAPLEGIC
Space1 Inventions (24)
THE SAFETY ROCKET
http://humanoidolabs.blogspot.tw/2014/04/safety-rocket-invention.html
THE MULTI-D
http://humanoidolabs.blogspot.tw/2014/12/multi-d-invention-for-space1.html
KOMPUTER
http://humanoidolabs.blogspot.tw/2014/10/komputer.html
REFERENTIAL TIME MACHINE RTF
http://humanoidolabs.blogspot.tw/2014/04/spaceone-referential-time-travel.html
http://humanoidolabs.blogspot.tw/2014/04/configuring-spaceone-time-travel-machine.html
http://humanoidolabs.blogspot.tw/2014/04/elements-of-spaceone-time-travel-machine.html
http://humanoidolabs.blogspot.tw/2014/03/spaceone-time-travel-dilation.html
POCKET TELESCOPE
http://humanoidolabs.blogspot.tw/2014/11/iphone-pocket-telescope.html
SPACE MACHINE
http://humanoidolabs.blogspot.tw/2014/09/space-machine.html
MICRO SPACECRAFT
http://humanoidolabs.blogspot.tw/2014/07/space1s-micro-spacecraft.html
SPACE1 MAGAZINE
http://humanoidolabs.blogspot.tw/2014/07/space1-magazine-issue-2.html
http://humanoidolabs.blogspot.tw/2014/03/spaceone-magazine.html
SPACE1 SPACE STATION
http://humanoidolabs.blogspot.tw/2014/06/space1-space-station.html
SPACE1 ROCKET INTL ENTERPRISE
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET DIA
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET ZEUS
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET ARGUS
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET ZEUS-ARGUS
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET M1 HEAVY LIFT
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKETM1 HYBRID
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET M2
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET B1 FIRST GENERATION
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET B1 BLASTER
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET B1 MASTER BLASTER
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET SINGULARITY 1
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET SINGULARITY 2
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
SPACE1 ROCKET SINGULARITY 3
http://humanoidolabs.blogspot.tw/2014/06/space1-rockets.html
STRIATED ROCKET CASING
http://humanoidolabs.blogspot.tw/2014/03/spaceone-striated-rocket-casing.html